Loading...
Searching...
No Matches
◆ rect_leaf_node_distance()
|
static |
Definition at line 1100 of file lwtree.c.
1101{
1103 DISTPTS dl;
1104
1105 //lwnotice("rect_leaf_node_distance, %d<->%d", n1->seg_num, n2->seg_num);
1106
1108
1110 {
1112 {
1114
1116 {
1119 lw_dist2d_pt_pt(q1, p1, &dl);
1120 break;
1121
1125 lw_dist2d_pt_seg(p1, q1, q2, &dl);
1126 break;
1127
1132 lw_dist2d_pt_arc(p1, q1, q2, q3, &dl);
1133 break;
1134
1135 default:
1137 }
1138 break;
1139 }
1140
1142 {
1145
1147 {
1150 lw_dist2d_pt_seg(q1, p1, p2, &dl);
1151 break;
1152
1156 lw_dist2d_seg_seg(q1, q2, p1, p2, &dl);
1157 // lwnotice(
1158 // "%d\tLINESTRING(%g %g,%g %g)\t%d\tLINESTRING(%g %g,%g %g)\t%g\t%g\t%g",
1159 // n1->seg_num,
1160 // p1->x, p1->y, p2->x, p2->y,
1161 // n2->seg_num,
1162 // q1->x, q1->y, q2->x, q2->y,
1163 // dl.distance, state->min_dist, state->max_dist);
1164 break;
1165
1170 lw_dist2d_seg_arc(p1, p2, q1, q2, q3, &dl);
1171 break;
1172
1173 default:
1175 }
1176 break;
1177 }
1179 {
1183
1185 {
1188 lw_dist2d_pt_arc(q1, p1, p2, p3, &dl);
1189 break;
1190
1194 lw_dist2d_seg_arc(q1, q2, p1, p2, p3, &dl);
1195 break;
1196
1201 lw_dist2d_arc_arc(p1, p2, p3, q1, q2, q3, &dl);
1202 break;
1203
1204 default:
1206 }
1207 break;
1208 }
1209 default:
1211 }
1212
1213 /* If this is a new global minima, save it */
1215 {
1219 }
1220
1222}
void void lwerror(const char *fmt,...) __attribute__((format(printf
Write a notice out to the error handler.
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
Definition lwinline.h:97
int lw_dist2d_pt_arc(const POINT2D *P, const POINT2D *A1, const POINT2D *A2, const POINT2D *A3, DISTPTS *dl)
Definition measures.c:1495
int lw_dist2d_pt_seg(const POINT2D *p, const POINT2D *A, const POINT2D *B, DISTPTS *dl)
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before i...
Definition measures.c:2217
int lw_dist2d_seg_seg(const POINT2D *A, const POINT2D *B, const POINT2D *C, const POINT2D *D, DISTPTS *dl)
Finds the shortest distance between two segments.
Definition measures.c:1830
int lw_dist2d_seg_arc(const POINT2D *A1, const POINT2D *A2, const POINT2D *B1, const POINT2D *B2, const POINT2D *B3, DISTPTS *dl)
Calculate the shortest distance between an arc and an edge.
Definition measures.c:1351
int lw_dist2d_arc_arc(const POINT2D *A1, const POINT2D *A2, const POINT2D *A3, const POINT2D *B1, const POINT2D *B2, const POINT2D *B3, DISTPTS *dl)
Definition measures.c:1677
int lw_dist2d_pt_pt(const POINT2D *thep1, const POINT2D *thep2, DISTPTS *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition measures.c:2312
Definition liblwgeom.h:389
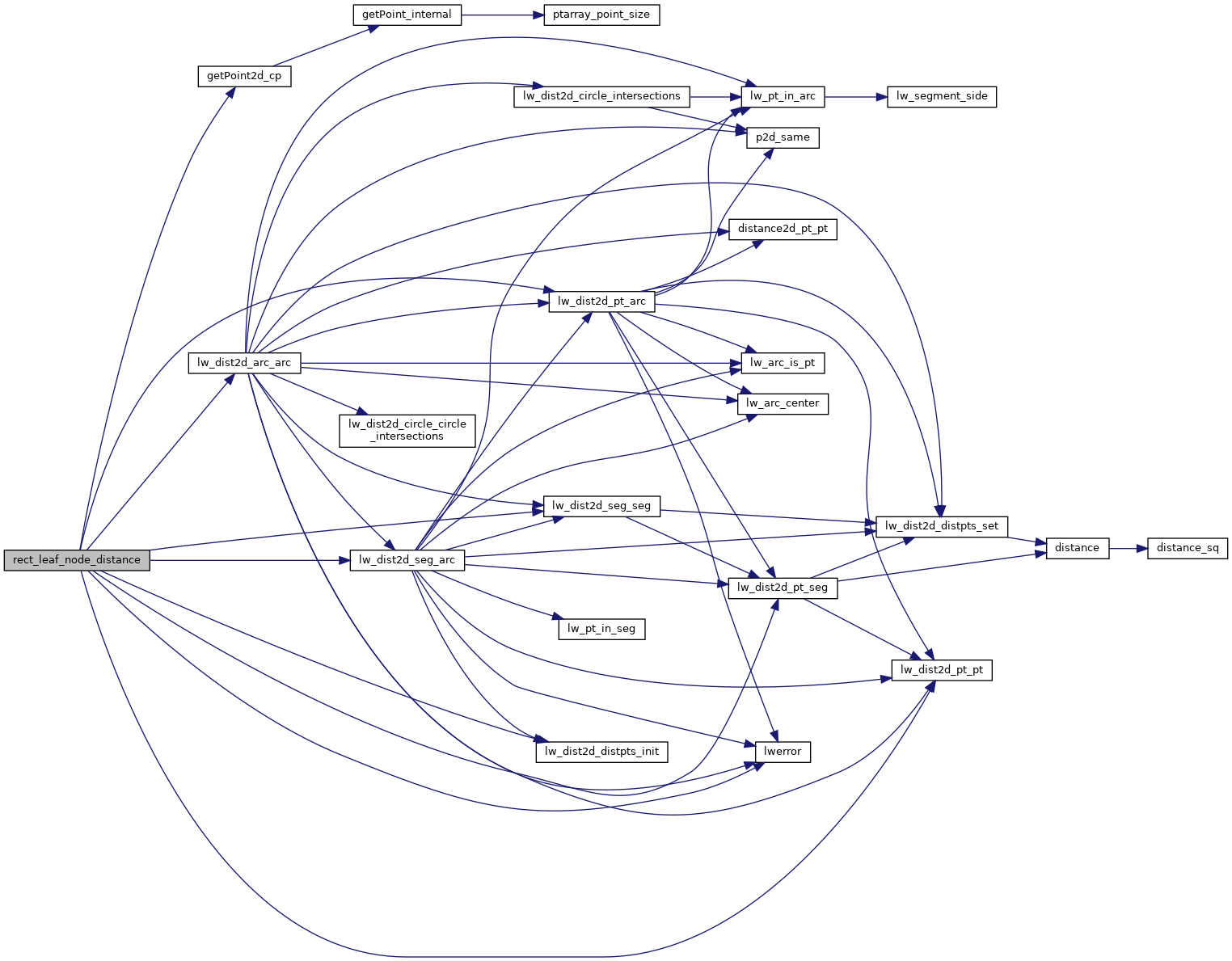
References DIST_MIN, DISTPTS::distance, getPoint2d_cp(), lw_dist2d_arc_arc(), lw_dist2d_distpts_init(), lw_dist2d_pt_arc(), lw_dist2d_pt_pt(), lw_dist2d_pt_seg(), lw_dist2d_seg_arc(), lw_dist2d_seg_seg(), lwerror(), rect_tree_distance_state::min_dist, rect_tree_distance_state::p1, DISTPTS::p1, rect_tree_distance_state::p2, DISTPTS::p2, RECT_NODE_LEAF::pa, RECT_NODE_SEG_CIRCULAR, RECT_NODE_SEG_LINEAR, RECT_NODE_SEG_POINT, RECT_NODE_LEAF::seg_num, and RECT_NODE_LEAF::seg_type.
Referenced by rect_tree_distance_tree_recursive().
Here is the call graph for this function:
Here is the caller graph for this function:
