Loading...
Searching...
No Matches
◆ lwgeom_tcpa()
Find the time of closest point of approach.
- Parameters
-
mindist if not null will be set to the minimum distance between the trajectories at the closest point of approach.
- Returns
- the time value in which the minimum distance was reached, -1 if inputs are invalid (lwerror is called in that case), -2 if the trajectories do not share any point in time.
Definition at line 1138 of file lwlinearreferencing.c.
1139{
1140 LWLINE *l1, *l2;
1141 int i;
1142 GBOX gbox1, gbox2;
1143 double tmin, tmax;
1144 double *mvals;
1145 int nmvals = 0;
1146 double mintime;
1147 double mindist2 = FLT_MAX; /* minimum distance, squared */
1148
1150 {
1152 return -1;
1153 }
1154
1155 l1 = lwgeom_as_lwline(g1);
1156 l2 = lwgeom_as_lwline(g2);
1157
1158 if (!l1 || !l2)
1159 {
1161 return -1;
1162 }
1163
1165 {
1167 return -1;
1168 }
1169
1170 /* We use lwgeom_calculate_gbox() instead of lwgeom_get_gbox() */
1171 /* because we cannot afford the float rounding inaccuracy when */
1172 /* we compare the ranges for overlap below */
1173 lwgeom_calculate_gbox(g1, &gbox1);
1174 lwgeom_calculate_gbox(g2, &gbox2);
1175
1176 /*
1177 * Find overlapping M range
1178 * WARNING: may be larger than the real one
1179 */
1180
1183
1184 if (tmax < tmin)
1185 {
1187 return -2;
1188 }
1189
1190 // lwnotice("Min:%g, Max:%g", tmin, tmax);
1191
1192 /*
1193 * Collect M values in common time range from inputs
1194 */
1195
1197
1198 /* TODO: also clip the lines ? */
1201
1202 /* Sort values in ascending order */
1204
1205 /* Remove duplicated values */
1206 nmvals = uniq(mvals, nmvals);
1207
1208 if (nmvals < 2)
1209 {
1210 {
1211 /* there's a single time, must be that one... */
1212 double t0 = mvals[0];
1213 POINT4D p0, p1;
1215 if (mindist)
1216 {
1218 {
1219 lwfree(mvals);
1221 return -1;
1222 }
1224 {
1225 lwfree(mvals);
1227 return -1;
1228 }
1230 }
1231 lwfree(mvals);
1232 return t0;
1233 }
1234 }
1235
1236 /*
1237 * For each consecutive pair of measures, compute time of closest point
1238 * approach and actual distance between points at that time
1239 */
1240 mintime = tmin;
1241 for (i = 1; i < nmvals; ++i)
1242 {
1243 double t0 = mvals[i - 1];
1244 double t1 = mvals[i];
1245 double t;
1246 POINT4D p0, p1, q0, q1;
1247 int seg;
1248 double dist2;
1249
1250 // lwnotice("T %g-%g", t0, t1);
1251
1253 if (-1 == seg)
1254 continue; /* possible, if GBOX is approximated */
1255 // lwnotice("Measure %g on segment %d of line 1: %g, %g, %g", t0, seg, p0.x, p0.y, p0.z);
1256
1258 if (-1 == seg)
1259 continue; /* possible, if GBOX is approximated */
1260 // lwnotice("Measure %g on segment %d of line 1: %g, %g, %g", t1, seg, p1.x, p1.y, p1.z);
1261
1263 if (-1 == seg)
1264 continue; /* possible, if GBOX is approximated */
1265 // lwnotice("Measure %g on segment %d of line 2: %g, %g, %g", t0, seg, q0.x, q0.y, q0.z);
1266
1268 if (-1 == seg)
1269 continue; /* possible, if GBOX is approximated */
1270 // lwnotice("Measure %g on segment %d of line 2: %g, %g, %g", t1, seg, q1.x, q1.y, q1.z);
1271
1272 t = segments_tcpa(&p0, &p1, &q0, &q1, t0, t1);
1273
1274 /*
1275 lwnotice("Closest points: %g,%g,%g and %g,%g,%g at time %g",
1276 p0.x, p0.y, p0.z,
1277 q0.x, q0.y, q0.z, t);
1278 */
1279
1280 dist2 = (q0.x - p0.x) * (q0.x - p0.x) + (q0.y - p0.y) * (q0.y - p0.y) + (q0.z - p0.z) * (q0.z - p0.z);
1281 if (dist2 < mindist2)
1282 {
1283 mindist2 = dist2;
1284 mintime = t;
1285 // lwnotice("MINTIME: %g", mintime);
1286 }
1287 }
1288
1289 /*
1290 * Release memory
1291 */
1292
1293 lwfree(mvals);
1294
1295 if (mindist)
1296 {
1297 *mindist = sqrt(mindist2);
1298 }
1299 /*lwnotice("MINDIST: %g", sqrt(mindist2));*/
1300
1301 return mintime;
1302}
double distance3d_pt_pt(const POINT3D *p1, const POINT3D *p2)
Definition measures3d.c:1066
int lwgeom_calculate_gbox(const LWGEOM *lwgeom, GBOX *gbox)
Calculate bounding box of a geometry, automatically taking into account whether it is cartesian or ge...
Definition lwgeom.c:783
int lwgeom_has_m(const LWGEOM *geom)
Return LW_TRUE if geometry has M ordinates.
Definition lwgeom.c:969
void void lwerror(const char *fmt,...) __attribute__((format(printf
Write a notice out to the error handler.
static int ptarray_collect_mvals(const POINTARRAY *pa, double tmin, double tmax, double *mvals)
Definition lwlinearreferencing.c:1059
static int compare_double(const void *pa, const void *pb)
Definition lwlinearreferencing.c:1073
static double segments_tcpa(POINT4D *p0, const POINT4D *p1, POINT4D *q0, const POINT4D *q1, double t0, double t1)
Definition lwlinearreferencing.c:975
static int ptarray_locate_along_linear(const POINTARRAY *pa, double m, POINT4D *p, uint32_t from)
Definition lwlinearreferencing.c:1117
Definition liblwgeom.h:352
Definition liblwgeom.h:481
Definition liblwgeom.h:401
Definition liblwgeom.h:413
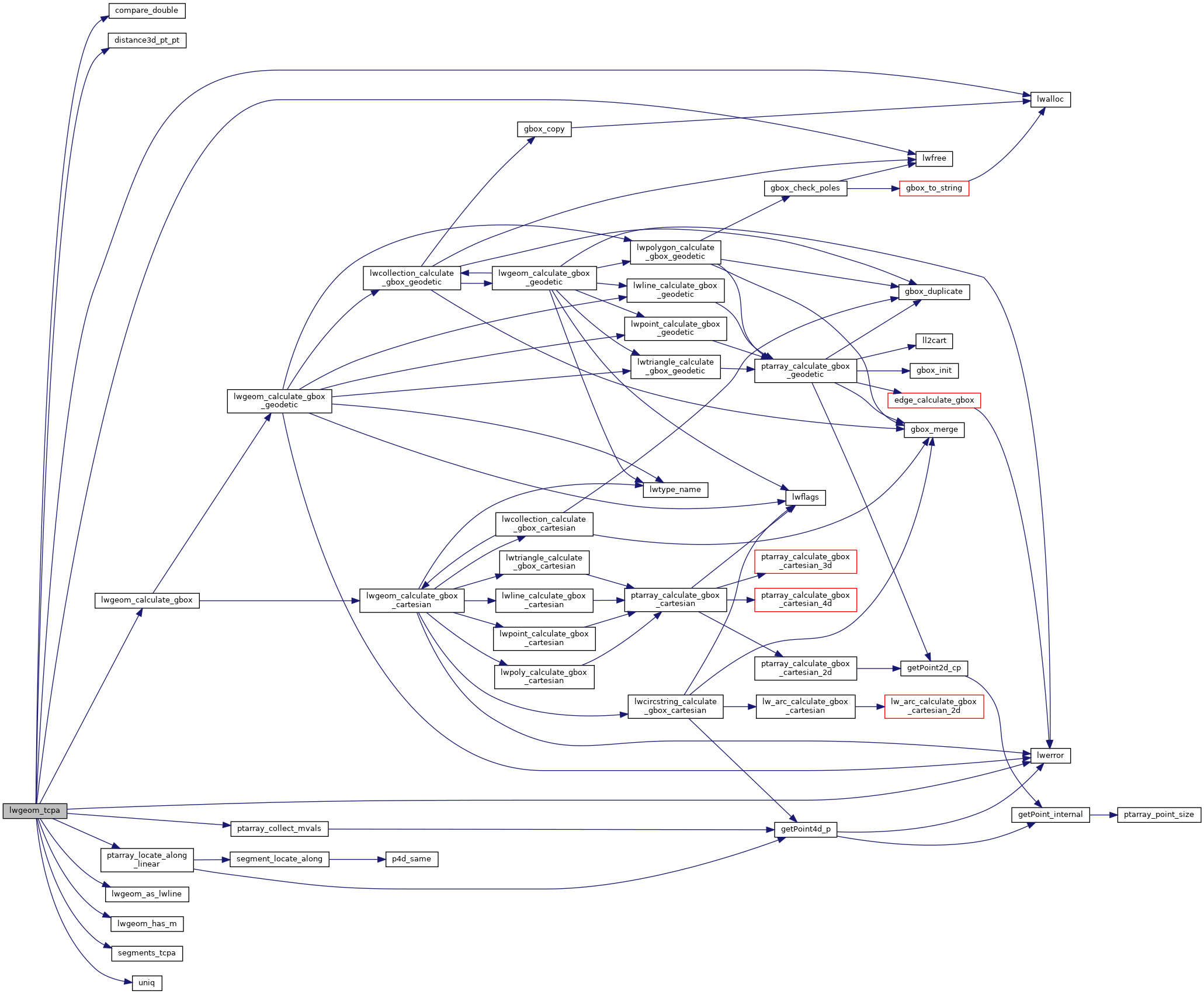
References compare_double(), distance3d_pt_pt(), FP_MAX, FP_MIN, lwalloc(), LWDEBUG, LWDEBUGF, lwerror(), lwfree(), lwgeom_as_lwline(), lwgeom_calculate_gbox(), lwgeom_has_m(), GBOX::mmax, GBOX::mmin, POINTARRAY::npoints, LWLINE::points, ptarray_collect_mvals(), ptarray_locate_along_linear(), segments_tcpa(), uniq(), POINT4D::x, POINT4D::y, and POINT4D::z.
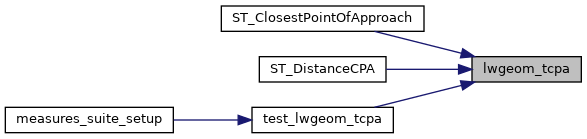
Referenced by ST_ClosestPointOfApproach(), ST_DistanceCPA(), and test_lwgeom_tcpa().
Here is the call graph for this function:
Here is the caller graph for this function: