Loading...
Searching...
No Matches
◆ segments_tcpa()
|
static |
Definition at line 975 of file lwlinearreferencing.c.
976{
981
982 /*
983 lwnotice("FROM %g,%g,%g,%g -- %g,%g,%g,%g",
984 p0->x, p0->y, p0->z, p0->m,
985 p1->x, p1->y, p1->z, p1->m);
986 lwnotice(" TO %g,%g,%g,%g -- %g,%g,%g,%g",
987 q0->x, q0->y, q0->z, q0->m,
988 q1->x, q1->y, q1->z, q1->m);
989 */
990
991 /* PV aka U */
995 /*lwnotice("PV: %g, %g, %g", pv.x, pv.y, pv.z);*/
996
997 /* QV aka V */
1001 /*lwnotice("QV: %g, %g, %g", qv.x, qv.y, qv.z);*/
1002
1006 /*lwnotice("DV: %g, %g, %g", dv.x, dv.y, dv.z);*/
1007
1009 /*lwnotice("DOT: %g", dv2);*/
1010
1011 if (dv2 == 0.0)
1012 {
1013 /* Distance is the same at any time, we pick the earliest */
1014 return t0;
1015 }
1016
1017 /* Distance at any given time, with t0 */
1021
1022 /*lwnotice("W0: %g, %g, %g", w0.x, w0.y, w0.z);*/
1023
1024 /* Check that at distance dt w0 is distance */
1025
1026 /* This is the fraction of measure difference */
1028 /*lwnotice("CLOSEST TIME (fraction): %g", t);*/
1029
1030 if (t > 1.0)
1031 {
1032 /* Getting closer as we move to the end */
1033 /*lwnotice("Converging");*/
1034 t = 1;
1035 }
1036 else if (t < 0.0)
1037 {
1038 /*lwnotice("Diverging");*/
1039 t = 0;
1040 }
1041
1042 /* Interpolate the actual points now */
1043
1047
1051
1052 t = t0 + (t1 - t0) * t;
1053 /*lwnotice("CLOSEST TIME (real): %g", t);*/
1054
1055 return t;
1056}
Definition liblwgeom.h:395
References DOT, POINT3DZ::x, POINT4D::x, POINT3DZ::y, POINT4D::y, POINT3DZ::z, and POINT4D::z.
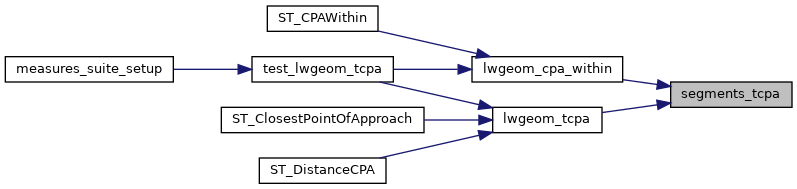
Referenced by lwgeom_cpa_within(), and lwgeom_tcpa().
Here is the caller graph for this function: