Loading...
Searching...
No Matches
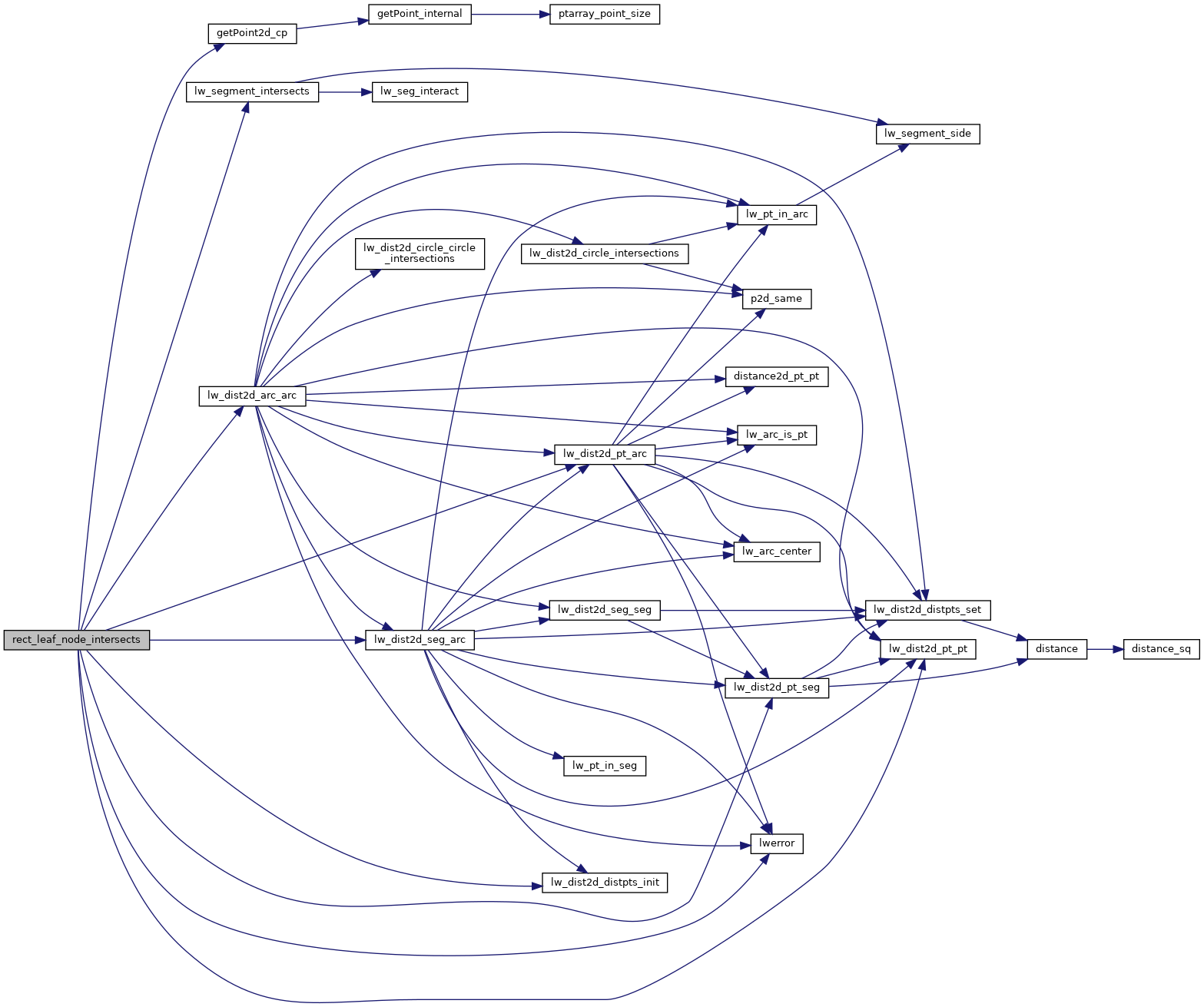
◆ rect_leaf_node_intersects()
|
static |
Definition at line 85 of file lwtree.c.
86{
88 DISTPTS dl;
89 lw_dist2d_distpts_init(&dl, 1);
91 {
93 {
95
97 {
100 lw_dist2d_pt_pt(q1, p1, &dl);
102
106 lw_dist2d_pt_seg(p1, q1, q2, &dl);
108
113 lw_dist2d_pt_arc(p1, q1, q2, q3, &dl);
115
116 default:
118 break;
119 }
120
121 break;
122 }
123
125 {
128
130 {
133 lw_dist2d_pt_seg(q1, p1, p2, &dl);
135
140
145 lw_dist2d_seg_arc(p1, p2, q1, q2, q3, &dl);
147
148 default:
150 break;
151 }
152
153 break;
154 }
156 {
160
162 {
165 lw_dist2d_pt_arc(q1, p1, p2, p3, &dl);
167
171 lw_dist2d_seg_arc(q1, q2, p1, p2, p3, &dl);
173
178 lw_dist2d_arc_arc(p1, p2, p3, q1, q2, q3, &dl);
180
181 default:
183 break;
184 }
185
186 break;
187 }
188 default:
190 }
192}
int lw_segment_intersects(const POINT2D *p1, const POINT2D *p2, const POINT2D *q1, const POINT2D *q2)
returns the kind of CG_SEGMENT_INTERSECTION_TYPE behavior of lineseg 1 (constructed from p1 and p2) a...
Definition lwalgorithm.c:388
void void lwerror(const char *fmt,...) __attribute__((format(printf
Write a notice out to the error handler.
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
Definition lwinline.h:97
int lw_dist2d_pt_arc(const POINT2D *P, const POINT2D *A1, const POINT2D *A2, const POINT2D *A3, DISTPTS *dl)
Definition measures.c:1495
int lw_dist2d_pt_seg(const POINT2D *p, const POINT2D *A, const POINT2D *B, DISTPTS *dl)
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before i...
Definition measures.c:2217
int lw_dist2d_seg_arc(const POINT2D *A1, const POINT2D *A2, const POINT2D *B1, const POINT2D *B2, const POINT2D *B3, DISTPTS *dl)
Calculate the shortest distance between an arc and an edge.
Definition measures.c:1351
int lw_dist2d_arc_arc(const POINT2D *A1, const POINT2D *A2, const POINT2D *A3, const POINT2D *B1, const POINT2D *B2, const POINT2D *B3, DISTPTS *dl)
Definition measures.c:1677
int lw_dist2d_pt_pt(const POINT2D *thep1, const POINT2D *thep2, DISTPTS *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition measures.c:2312
Definition liblwgeom.h:389
References DISTPTS::distance, getPoint2d_cp(), lw_dist2d_arc_arc(), lw_dist2d_distpts_init(), lw_dist2d_pt_arc(), lw_dist2d_pt_pt(), lw_dist2d_pt_seg(), lw_dist2d_seg_arc(), LW_FALSE, lw_segment_intersects(), lwerror(), RECT_NODE_LEAF::pa, RECT_NODE_SEG_CIRCULAR, RECT_NODE_SEG_LINEAR, RECT_NODE_SEG_POINT, RECT_NODE_LEAF::seg_num, and RECT_NODE_LEAF::seg_type.
Referenced by rect_tree_intersects_tree_recursive().
Here is the call graph for this function:
Here is the caller graph for this function:
