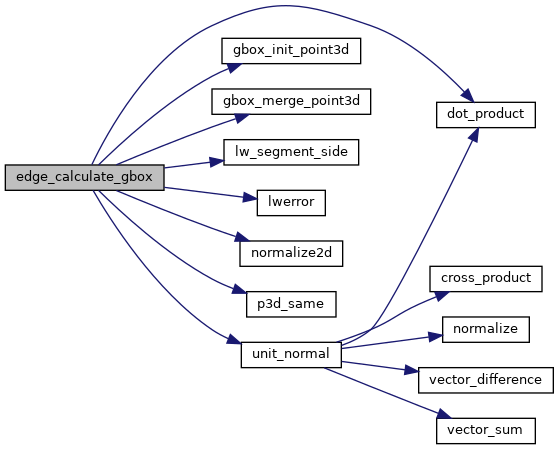
The magic function, given an edge in spherical coordinates, calculate a 3D bounding box that fully contains it, taking into account the curvature of the sphere on which it is inscribed.
Any arc on the sphere defines a plane that bisects the sphere. In this plane, the arc is a portion of a unit circle. Projecting the end points of the axes (1,0,0), (-1,0,0) etc, into the plane and normalizing yields potential extrema points. Those points on the side of the plane-dividing line formed by the end points that is opposite the origin of the plane are extrema and should be added to the bounding box.
Definition at line 1362 of file lwgeodetic.c.
1363{
1367 int i, o_side;
1368
1369
1372
1373
1376
1377
1379 {
1380 lwerror(
"Antipodal (180 degrees long) edge detected!");
1382 }
1383
1384
1387
1388
1393
1394
1395 memset(X, 0,
sizeof(
POINT3D) * 6);
1396 X[0].
x = X[2].
y = X[4].
z = 1.0;
1397 X[1].
x = X[3].
y = X[5].
z = -1.0;
1398
1399
1401
1403
1404
1405 for ( i = 0; i < 6; i++ )
1406 {
1407
1411
1412
1413
1414
1416 {
1418 Xn.
x = RX.
x * A1->
x + RX.
y * A3.
x;
1419 Xn.
y = RX.
x * A1->
y + RX.
y * A3.
y;
1420 Xn.
z = RX.
x * A1->
z + RX.
y * A3.
z;
1421
1423 }
1424 }
1425
1427}
int gbox_merge_point3d(const POINT3D *p, GBOX *gbox)
Update the GBOX to be large enough to include itself and the new point.
int gbox_init_point3d(const POINT3D *p, GBOX *gbox)
Initialize a GBOX using the values of the point.
int p3d_same(const POINT3D *p1, const POINT3D *p2)
int lw_segment_side(const POINT2D *p1, const POINT2D *p2, const POINT2D *q)
lw_segment_side()
static void normalize2d(POINT2D *p)
Normalize to a unit vector.
void unit_normal(const POINT3D *P1, const POINT3D *P2, POINT3D *normal)
Calculates the unit normal to two vectors, trying to avoid problems with over-narrow or over-wide cas...
static double dot_product(const POINT3D *p1, const POINT3D *p2)
Convert cartesian coordinates on unit sphere to lon/lat coordinates static void cart2ll(const POINT3D...
void void lwerror(const char *fmt,...) __attribute__((format(printf
Write a notice out to the error handler.
References dot_product(), FP_EQUALS, gbox_init_point3d(), gbox_merge_point3d(), LW_FAILURE, lw_segment_side(), LW_SUCCESS, lwerror(), normalize2d(), p3d_same(), unit_normal(), POINT2D::x, POINT3D::x, POINT2D::y, POINT3D::y, and POINT3D::z.
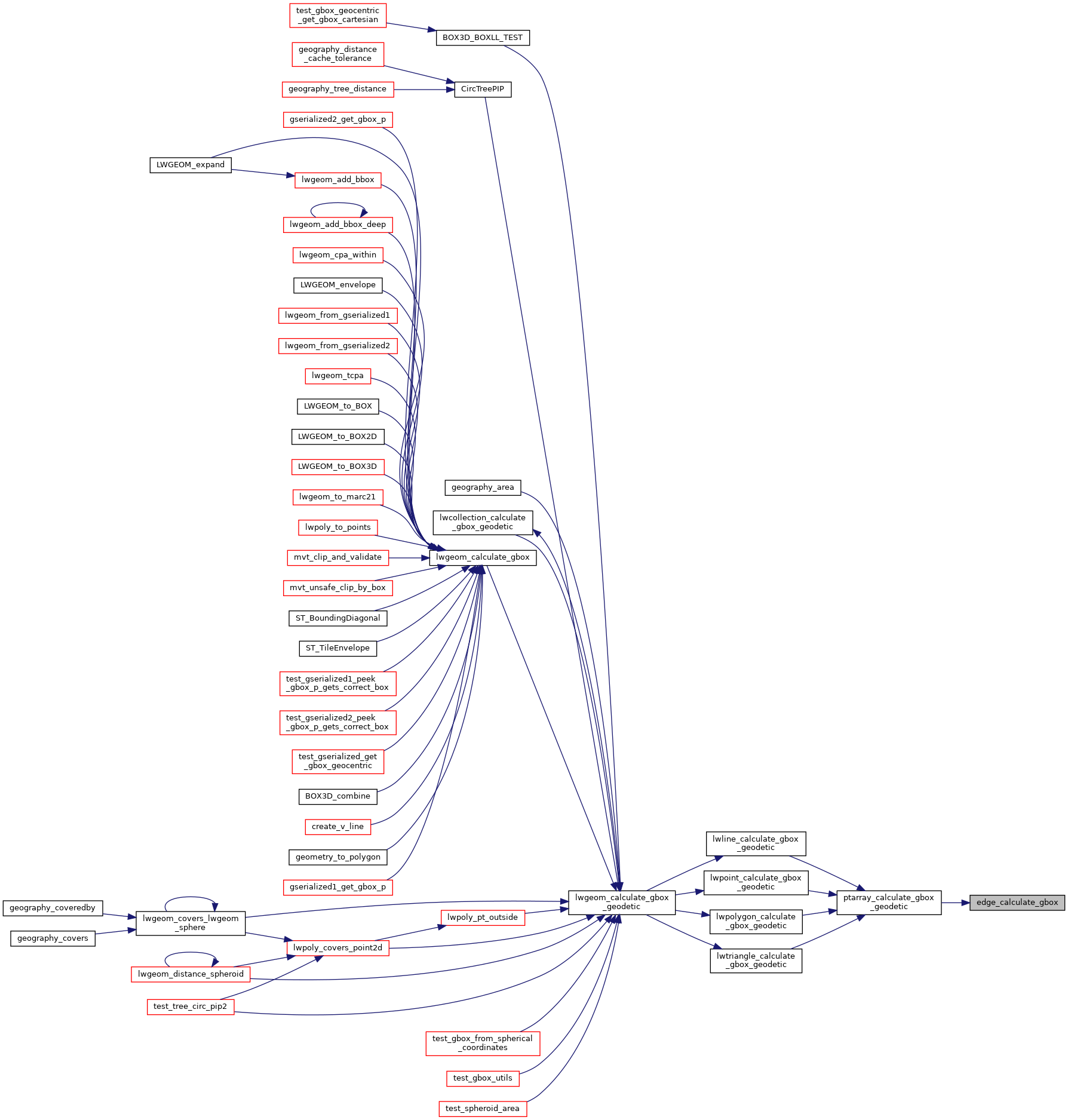
Referenced by ptarray_calculate_gbox_geodetic().