◆ ptarray_transform()
| int ptarray_transform | ( | POINTARRAY * | pa, |
| LWPROJ * | pj | ||
| ) |
Definition at line 257 of file liblwgeom/lwgeom_transform.c.
static void to_rad(POINT4D *pt)
convert decimal degress to radians
Definition: liblwgeom/lwgeom_transform.c:33
static void to_dec(POINT4D *pt)
convert radians to decimal degress
Definition: liblwgeom/lwgeom_transform.c:41
int getPoint4d_p(const POINTARRAY *pa, uint32_t n, POINT4D *point)
Definition: lwgeom_api.c:126
Definition: liblwgeom.h:428
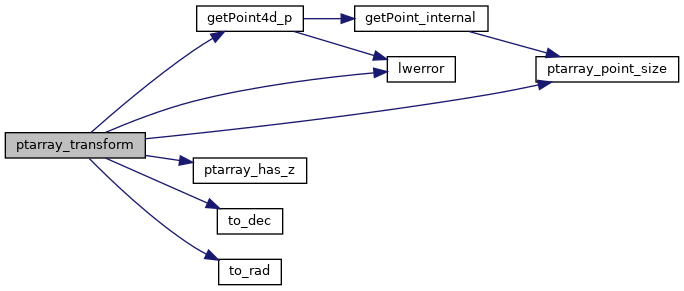
References getPoint4d_p(), LW_FAILURE, LW_SUCCESS, lwerror(), POINTARRAY::npoints, LWPROJ::pj, ptarray_has_z(), ptarray_point_size(), POINTARRAY::serialized_pointlist, to_dec(), to_rad(), pixval::x, and pixval::y.
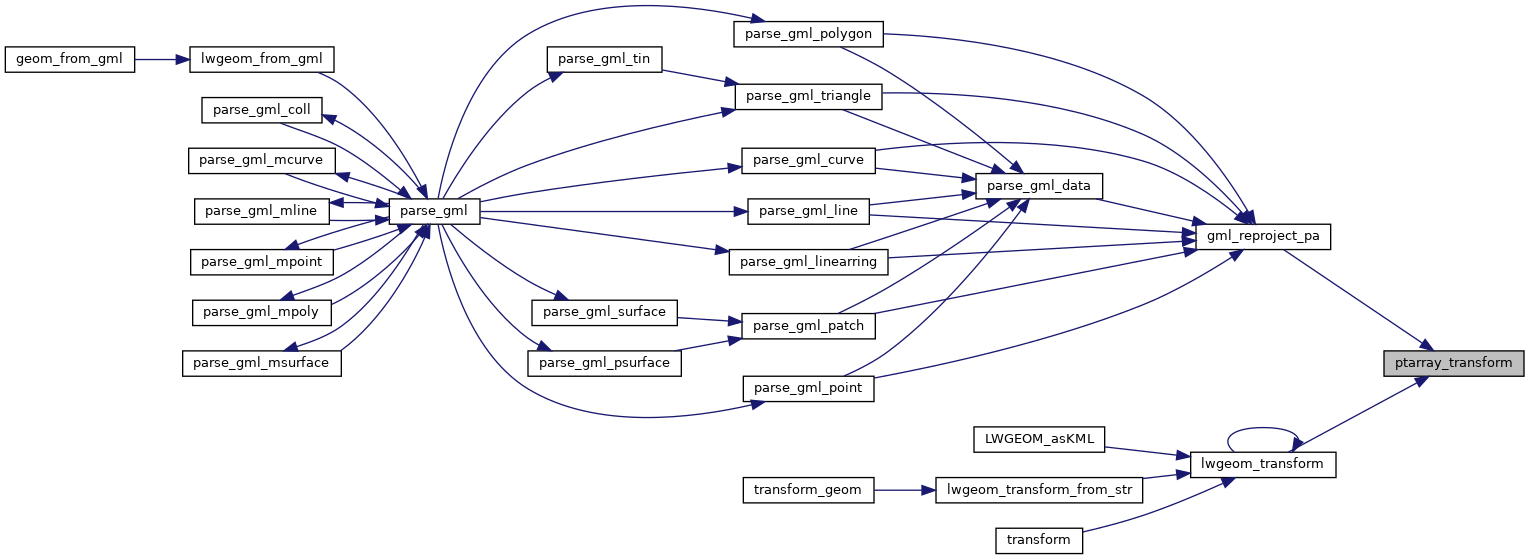
Referenced by gml_reproject_pa(), and lwgeom_transform().
Here is the call graph for this function:
Here is the caller graph for this function: