Loading...
Searching...
No Matches
◆ lw_dist3d_seg_seg()
| int lw_dist3d_seg_seg | ( | POINT3DZ * | s1p1, |
| POINT3DZ * | s1p2, | ||
| POINT3DZ * | s2p1, | ||
| POINT3DZ * | s2p2, | ||
| DISTPTS3D * | dl | ||
| ) |
Finds the two closest points on two linesegments.
Definition at line 1139 of file measures3d.c.
1140{
1141 VECTOR3D v1, v2, vl;
1142 double s1k, s2k; /*two variables representing where on Line 1 (s1k) and where on Line 2 (s2k) a connecting line
1143 between the two lines is perpendicular to both lines*/
1144 POINT3DZ p1, p2;
1145 double a, b, c, d, e, D;
1146
1147 /*s1p1 and s1p2 are the same point */
1149 {
1151 }
1152 /*s2p1 and s2p2 are the same point */
1154 {
1157 }
1158
1159 /*
1160 Here we use algorithm from softsurfer.com
1161 that can be found here
1162 http://softsurfer.com/Archive/algorithm_0106/algorithm_0106.htm
1163 */
1164
1167
1170
1173
1174 a = DOT(v1, v1);
1175 b = DOT(v1, v2);
1176 c = DOT(v2, v2);
1177 d = DOT(v1, vl);
1178 e = DOT(v2, vl);
1179 D = a * c - b * b;
1180
1181 if (D < 0.000000001)
1182 { /* the lines are almost parallel*/
1183 s1k =
1184 0.0; /*If the lines are parallel we try by using the startpoint of first segment. If that gives a
1185 projected point on the second line outside segment 2 it wil be found that s2k is >1 or <0.*/
1186 if (b > c) /* use the largest denominator*/
1187 s2k = d / b;
1188 else
1189 s2k = e / c;
1190 }
1191 else
1192 {
1193 s1k = (b * e - c * d) / D;
1194 s2k = (a * e - b * d) / D;
1195 }
1196
1197 /* Now we check if the projected closest point on the infinite lines is outside our segments. If so the
1198 * combinations with start and end points will be tested*/
1199
1200 if (s1k <= 0.0 || s1k >= 1.0 || s2k <= 0.0 || s2k >= 1.0)
1201 {
1202 if (s1k <= 0.0)
1203 {
1206 }
1207 if (s1k >= 1.0)
1208 {
1211 }
1212 if (s2k <= 0.0)
1213 {
1217 }
1218 if (s2k >= 1.0)
1219 {
1223 }
1224 }
1225 else
1226 { /*Find the closest point on the edges of both segments*/
1230
1234
1236 {
1238 }
1239 }
1241}
static int get_3dvector_from_points(POINT3DZ *p1, POINT3DZ *p2, VECTOR3D *v)
Definition measures3d.c:34
int lw_dist3d_pt_pt(POINT3DZ *thep1, POINT3DZ *thep2, DISTPTS3D *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition measures3d.c:1048
int lw_dist3d_pt_seg(POINT3DZ *p, POINT3DZ *A, POINT3DZ *B, DISTPTS3D *dl)
If searching for min distance, this one finds the closest point on segment A-B from p.
Definition measures3d.c:992
Definition liblwgeom.h:381
Definition measures3d.h:51
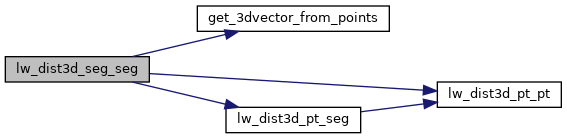
References DOT, get_3dvector_from_points(), lw_dist3d_pt_pt(), lw_dist3d_pt_seg(), LW_FALSE, LW_TRUE, DISTPTS3D::twisted, POINT3DZ::x, POINT3DZ::y, and POINT3DZ::z.
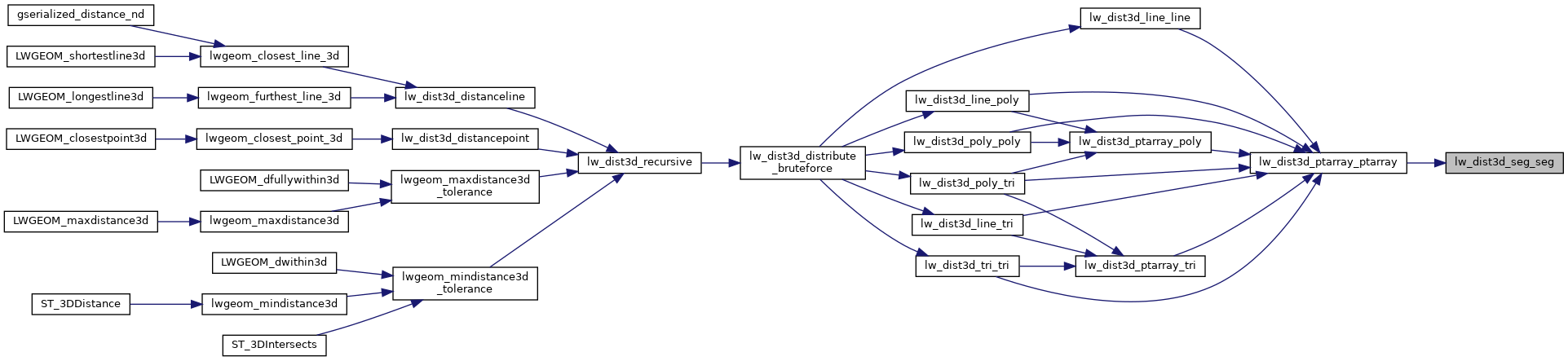
Referenced by lw_dist3d_ptarray_ptarray().
Here is the call graph for this function:
Here is the caller graph for this function: