Loading...
Searching...
No Matches
◆ ptarray_transform()
| int ptarray_transform | ( | POINTARRAY * | pa, |
| LWPROJ * | pj | ||
| ) |
Definition at line 230 of file liblwgeom/lwgeom_transform.c.
231{
232 uint32_t i;
233 POINT4D p;
234 size_t n_converted;
239
240 PJ_DIRECTION direction = pj->pipeline_is_forward ? PJ_FWD : PJ_INV;
241
242 /* Convert to radians if necessary */
244 {
246 {
247 getPoint4d_p(pa, i, &p);
248 to_rad(&p);
249 ptarray_set_point4d(pa, i, &p);
250 }
251 }
252
253 if (n_points == 1)
254 {
255 /* For single points it's faster to call proj_trans */
256 PJ_XYZT v = {pa_double[0], pa_double[1], has_z ? pa_double[2] : 0.0, 0.0};
257 PJ_COORD c;
258 c.xyzt = v;
259 PJ_COORD t = proj_trans(pj->pj, direction, c);
260
262 if (pj_errno_val)
263 {
266 }
267 pa_double[0] = (t.xyzt).x;
268 pa_double[1] = (t.xyzt).y;
269 if (has_z)
270 pa_double[2] = (t.xyzt).z;
271 }
272 else
273 {
274 /*
275 * size_t proj_trans_generic(PJ *P, PJ_DIRECTION direction,
276 * double *x, size_t sx, size_t nx,
277 * double *y, size_t sy, size_t ny,
278 * double *z, size_t sz, size_t nz,
279 * double *t, size_t st, size_t nt)
280 */
281
282 n_converted = proj_trans_generic(pj->pj,
283 direction,
284 pa_double,
285 point_size,
286 n_points, /* X */
287 pa_double + 1,
288 point_size,
289 n_points, /* Y */
290 has_z ? pa_double + 2 : NULL,
291 has_z ? point_size : 0,
292 has_z ? n_points : 0, /* Z */
293 NULL,
294 0,
295 0 /* M */
296 );
297
298 if (n_converted != n_points)
299 {
302 }
303
305 if (pj_errno_val)
306 {
309 }
310 }
311
312 /* Convert radians to degrees if necessary */
314 {
316 {
317 getPoint4d_p(pa, i, &p);
318 to_dec(&p);
319 ptarray_set_point4d(pa, i, &p);
320 }
321 }
322
324}
static void to_rad(POINT4D *pt)
convert decimal degrees to radians
Definition liblwgeom/lwgeom_transform.c:33
static void to_dec(POINT4D *pt)
convert radians to decimal degrees
Definition liblwgeom/lwgeom_transform.c:41
int getPoint4d_p(const POINTARRAY *pa, uint32_t n, POINT4D *point)
Definition lwgeom_api.c:125
void ptarray_set_point4d(POINTARRAY *pa, uint32_t n, const POINT4D *p4d)
Definition lwgeom_api.c:369
void void lwerror(const char *fmt,...) __attribute__((format(printf
Write a notice out to the error handler.
Definition liblwgeom.h:413
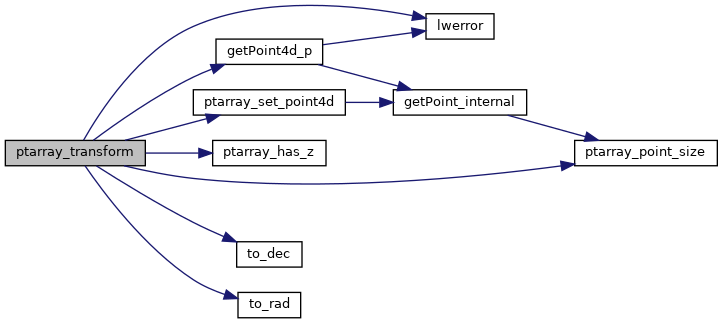
References getPoint4d_p(), LW_FAILURE, LW_SUCCESS, lwerror(), POINTARRAY::npoints, LWPROJ::pipeline_is_forward, LWPROJ::pj, ptarray_has_z(), ptarray_point_size(), ptarray_set_point4d(), POINTARRAY::serialized_pointlist, to_dec(), and to_rad().
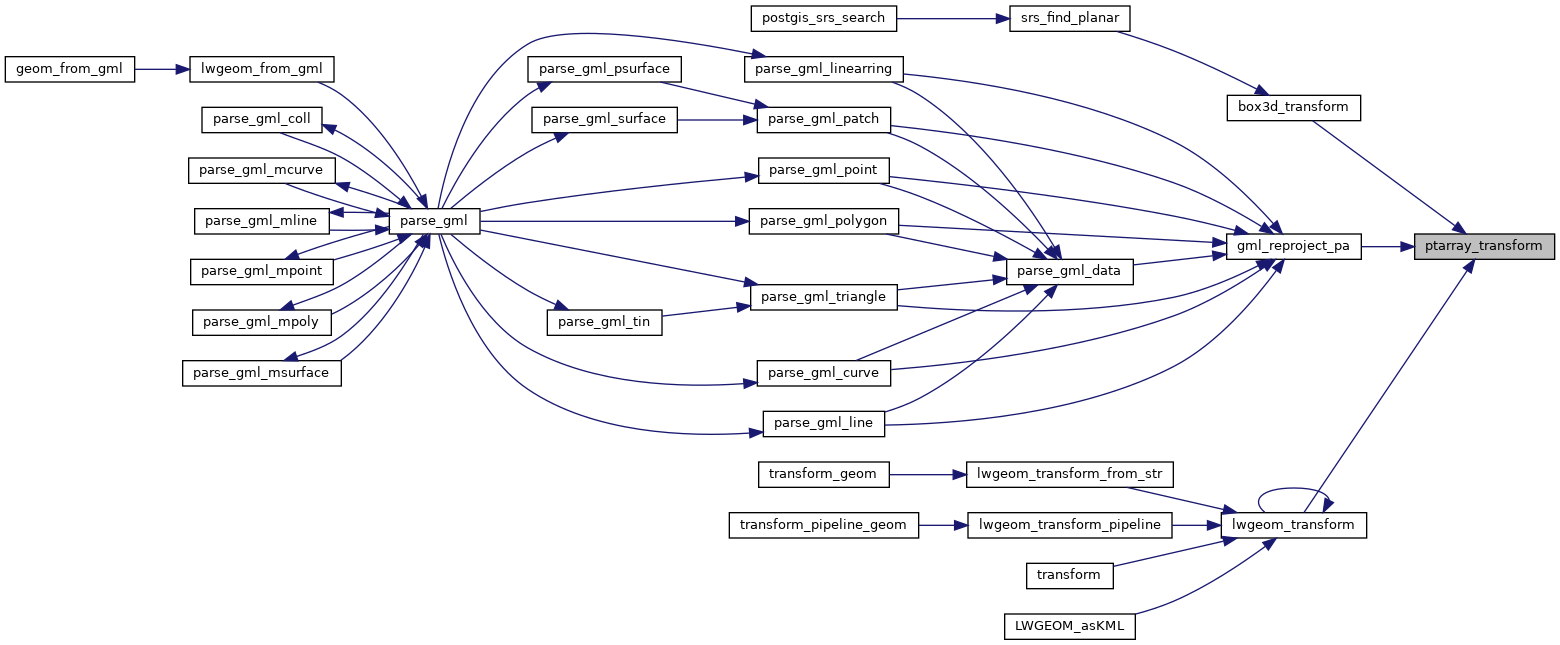
Referenced by box3d_transform(), gml_reproject_pa(), and lwgeom_transform().
Here is the call graph for this function:
Here is the caller graph for this function: