Loading...
Searching...
No Matches
◆ vector_rotate()
Rotates v1 through an angle (in radians) within the plane defined by v1/v2, returns the rotated vector in n.
Definition at line 573 of file lwgeodetic.c.
574{
575 POINT3D u;
576 double cos_a = cos(angle);
577 double sin_a = sin(angle);
578 double uxuy, uyuz, uxuz;
579 double ux2, uy2, uz2;
580 double rxx, rxy, rxz, ryx, ryy, ryz, rzx, rzy, rzz;
581
582 /* Need a unit vector normal to rotate around */
583 unit_normal(v1, v2, &u);
584
588
592
593 rxx = cos_a + ux2 * (1 - cos_a);
594 rxy = uxuy * (1 - cos_a) - u.z * sin_a;
595 rxz = uxuz * (1 - cos_a) + u.y * sin_a;
596
597 ryx = uxuy * (1 - cos_a) + u.z * sin_a;
598 ryy = cos_a + uy2 * (1 - cos_a);
599 ryz = uyuz * (1 - cos_a) - u.x * sin_a;
600
601 rzx = uxuz * (1 - cos_a) - u.y * sin_a;
602 rzy = uyuz * (1 - cos_a) + u.x * sin_a;
603 rzz = cos_a + uz2 * (1 - cos_a);
604
608
609 normalize(n);
610}
void unit_normal(const POINT3D *P1, const POINT3D *P2, POINT3D *normal)
Calculates the unit normal to two vectors, trying to avoid problems with over-narrow or over-wide cas...
Definition lwgeodetic.c:541
Definition liblwgeom.h:401
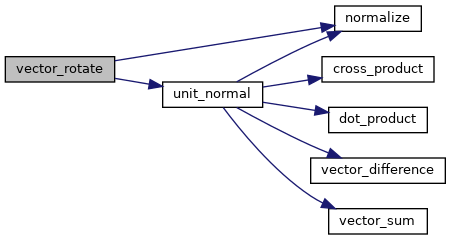
References normalize(), unit_normal(), POINT3D::x, POINT3D::y, and POINT3D::z.
Referenced by test_vector_rotate().
Here is the call graph for this function:
Here is the caller graph for this function:
