Loading...
Searching...
No Matches
◆ lw_dist2d_seg_seg()
| int lw_dist2d_seg_seg | ( | const POINT2D * | A, |
| const POINT2D * | B, | ||
| const POINT2D * | C, | ||
| const POINT2D * | D, | ||
| DISTPTS * | dl | ||
| ) |
Finds the shortest distance between two segments.
This function is changed so it is not doing any comparison of distance but just sending every possible combination further to lw_dist2d_pt_seg
Definition at line 1830 of file measures.c.
1831{
1834
1835 /*A and B are the same point */
1837 {
1839 }
1840
1841 /*U and V are the same point */
1843 {
1846 }
1847
1848 /* AB and CD are line segments */
1849 /* from comp.graphics.algo
1850
1851 Solving the above for r and s yields
1852 (Ay-Cy)(Dx-Cx)-(Ax-Cx)(Dy-Cy)
1853 r = ----------------------------- (eqn 1)
1854 (Bx-Ax)(Dy-Cy)-(By-Ay)(Dx-Cx)
1855
1856 (Ay-Cy)(Bx-Ax)-(Ax-Cx)(By-Ay)
1857 s = ----------------------------- (eqn 2)
1858 (Bx-Ax)(Dy-Cy)-(By-Ay)(Dx-Cx)
1859 Let P be the position vector of the intersection point, then
1860 P=A+r(B-A) or
1861 Px=Ax+r(Bx-Ax)
1862 Py=Ay+r(By-Ay)
1863 By examining the values of r & s, you can also determine some other limiting conditions:
1864 If 0<=r<=1 & 0<=s<=1, intersection exists
1865 r<0 or r>1 or s<0 or s>1 line segments do not intersect
1866 If the denominator in eqn 1 is zero, AB & CD are parallel
1867 If the numerator in eqn 1 is also zero, AB & CD are collinear.
1868
1869 */
1872
1875
1876 if ((r_bot == 0) || (s_bot == 0))
1877 {
1879 {
1880 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1881 dl->twisted *= -1;
1883 }
1884 else
1886 }
1887
1888 s = s_top / s_bot;
1889 r = r_top / r_bot;
1890
1892 {
1894 {
1895 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1896 dl->twisted *= -1;
1898 }
1899 else
1901 }
1902 else
1903 {
1904 /* If there is intersection we identify the intersection point and return it but only if we are looking
1905 * for mindistance */
1907 {
1908 POINT2D theP;
1909
1911 {
1914 }
1916 {
1919 }
1920 else
1921 {
1924 }
1925 lw_dist2d_distpts_set(dl, 0, &theP, &theP);
1926 }
1928 }
1929}
static void lw_dist2d_distpts_set(DISTPTS *dl, double distance, const POINT2D *p1, const POINT2D *p2)
Definition measures.c:81
int lw_dist2d_pt_seg(const POINT2D *p, const POINT2D *A, const POINT2D *B, DISTPTS *dl)
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before i...
Definition measures.c:2217
Definition liblwgeom.h:389
References DIST_MAX, DIST_MIN, lw_dist2d_distpts_set(), lw_dist2d_pt_seg(), LW_FALSE, LW_TRUE, DISTPTS::mode, r, s, DISTPTS::twisted, POINT2D::x, and POINT2D::y.
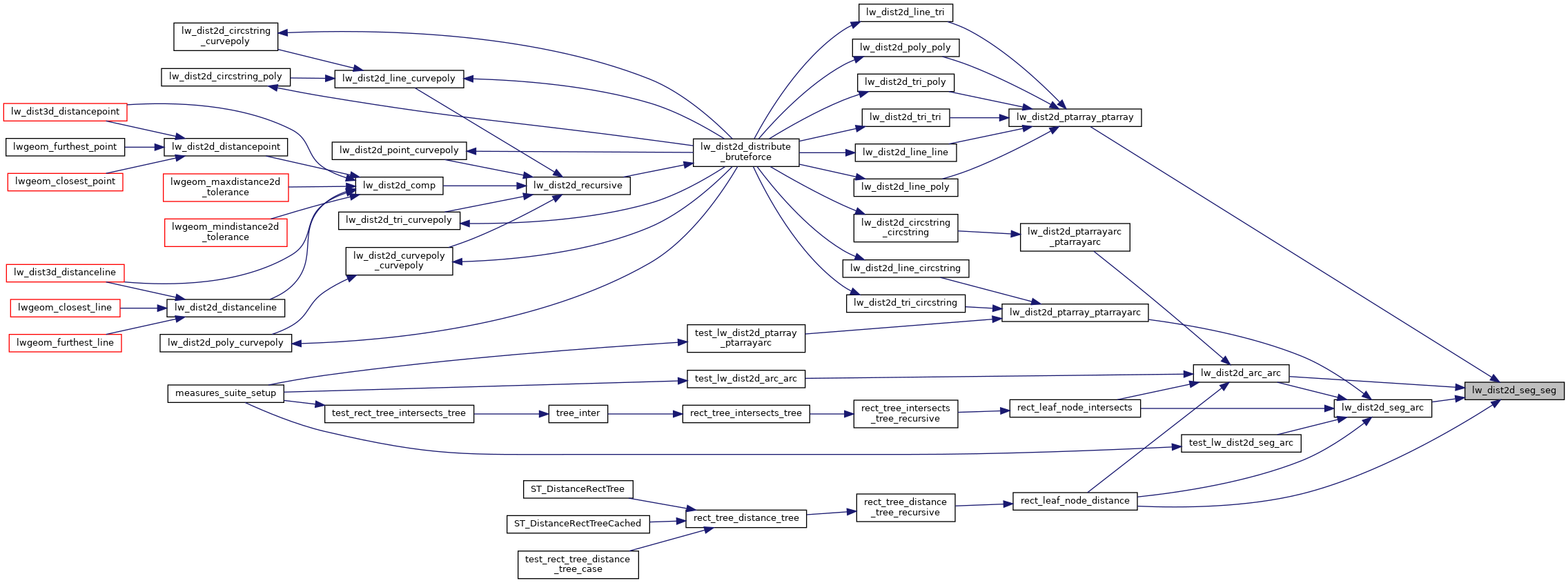
Referenced by lw_dist2d_arc_arc(), lw_dist2d_ptarray_ptarray(), lw_dist2d_seg_arc(), and rect_leaf_node_distance().
Here is the call graph for this function:

Here is the caller graph for this function: