Loading...
Searching...
No Matches
◆ lw_dist2d_pre_seg_seg()
| int lw_dist2d_pre_seg_seg | ( | POINTARRAY * | l1, |
| POINTARRAY * | l2, | ||
| LISTSTRUCT * | list1, | ||
| LISTSTRUCT * | list2, | ||
| double | k, | ||
| DISTPTS * | dl | ||
| ) |
preparation before lw_dist2d_seg_seg.
Definition at line 2071 of file measures.c.
2072{
2075 double maxmeasure;
2076 n1 = l1->npoints;
2077 n2 = l2->npoints;
2078
2080
2081 p1 = getPoint2d_cp(l1, list1[0].pnr);
2082 p3 = getPoint2d_cp(l2, list2[0].pnr);
2083 lw_dist2d_pt_pt(p1, p3, dl);
2086 for (i = (n1 - 1); i >= 0; --i)
2087 {
2088 /*we break this iteration when we have checked every point closer to our perpendicular "checkline" than
2089 * our shortest found distance*/
2090 if (((list2[0].themeasure - list1[i].themeasure)) > maxmeasure)
2091 break;
2092 /*because we are not iterating in the original point order we have to check the segment before and after
2093 * every point*/
2095 {
2096 pnr1 = list1[i].pnr;
2097 p1 = getPoint2d_cp(l1, pnr1);
2099 {
2100 p01 = getPoint2d_cp(l1, (n1 - 1));
2102 pnr2 = (n1 - 1);
2103 else
2104 pnr2 = pnr1; /* if it is a line and the last and first point is not the same we
2105 avoid the edge between start and end this way*/
2106 }
2107
2109 {
2110 p01 = getPoint2d_cp(l1, 0);
2112 pnr2 = 0;
2113 else
2114 pnr2 = pnr1; /* if it is a line and the last and first point is not the same we
2115 avoid the edge between start and end this way*/
2116 }
2117 else
2118 pnr2 = pnr1 + r;
2119
2120 p2 = getPoint2d_cp(l1, pnr2);
2121 for (u = 0; u < n2; ++u)
2122 {
2123 if (((list2[u].themeasure - list1[i].themeasure)) >= maxmeasure)
2124 break;
2125 pnr3 = list2[u].pnr;
2126 p3 = getPoint2d_cp(l2, pnr3);
2127 if (pnr3 == 0)
2128 {
2129 p02 = getPoint2d_cp(l2, (n2 - 1));
2131 pnr4 = (n2 - 1);
2132 else
2133 pnr4 = pnr3; /* if it is a line and the last and first point is not the
2134 same we avoid the edge between start and end this way*/
2135 }
2136 else
2137 pnr4 = pnr3 - 1;
2138
2139 p4 = getPoint2d_cp(l2, pnr4);
2140 dl->twisted = twist;
2143
2144 if (pnr3 >= (n2 - 1))
2145 {
2146 p02 = getPoint2d_cp(l2, 0);
2148 pnr4 = 0;
2149 else
2150 pnr4 = pnr3; /* if it is a line and the last and first point is not the
2151 same we avoid the edge between start and end this way*/
2152 }
2153
2154 else
2155 pnr4 = pnr3 + 1;
2156
2157 p4 = getPoint2d_cp(l2, pnr4);
2161 /*here we "translate" the found mindistance so it can be compared to our "z"-values*/
2163 }
2164 }
2165 }
2166
2168}
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
Definition lwinline.h:97
int lw_dist2d_selected_seg_seg(const POINT2D *A, const POINT2D *B, const POINT2D *C, const POINT2D *D, DISTPTS *dl)
This is the same function as lw_dist2d_seg_seg but without any calculations to determine intersection...
Definition measures.c:2176
int lw_dist2d_pt_pt(const POINT2D *thep1, const POINT2D *thep2, DISTPTS *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition measures.c:2312
Definition liblwgeom.h:389
References DISTPTS::distance, getPoint2d_cp(), lw_dist2d_pt_pt(), lw_dist2d_selected_seg_seg(), LW_FALSE, LW_TRUE, LWDEBUG, POINTARRAY::npoints, LISTSTRUCT::pnr, r, DISTPTS::twisted, POINT2D::x, and POINT2D::y.
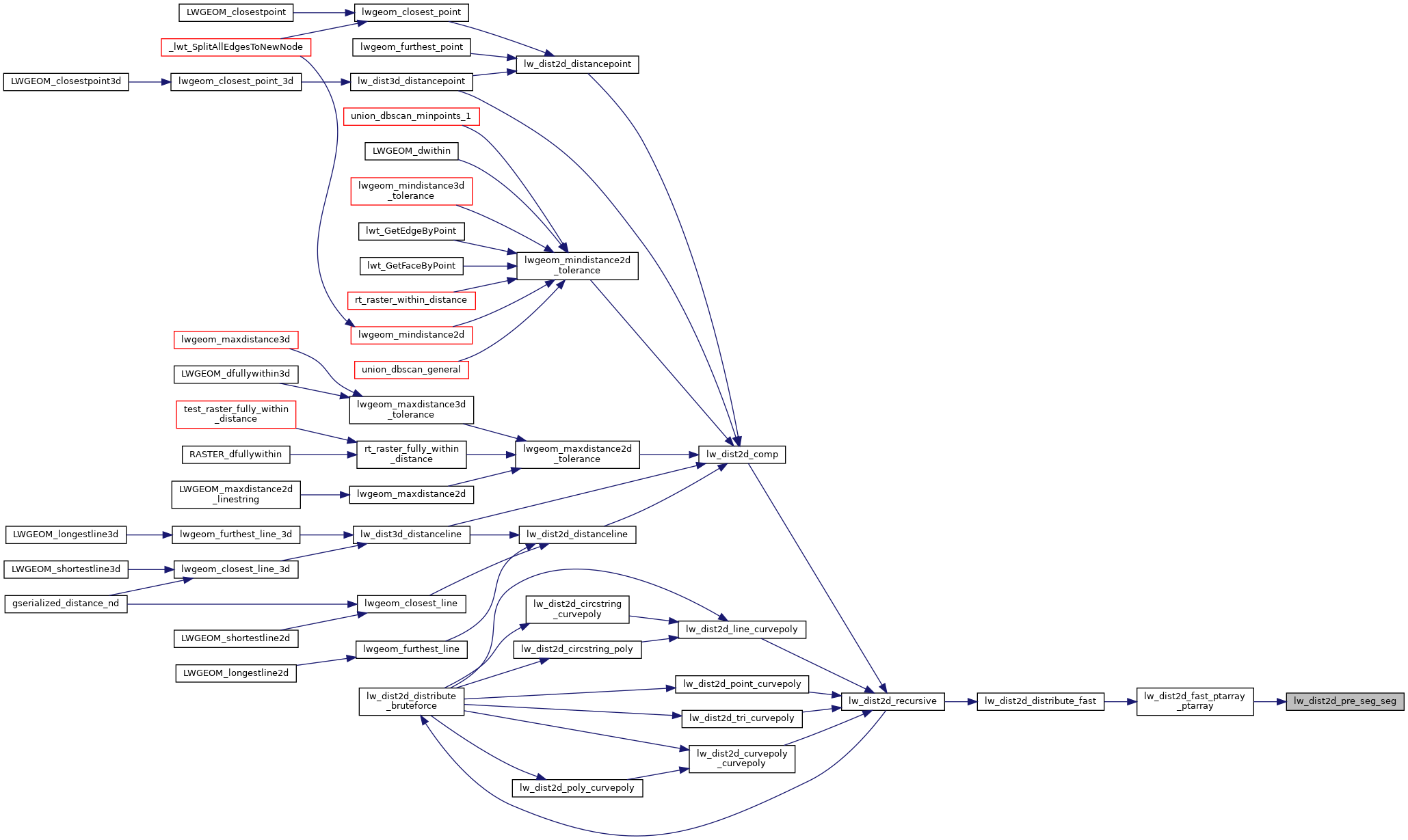
Referenced by lw_dist2d_fast_ptarray_ptarray().
Here is the call graph for this function:

Here is the caller graph for this function: