◆ lw_dist3d_pt_seg()
If searching for min distance, this one finds the closest point on segment A-B from p.
if searching for max distance it just sends p-A and p-B to pt-pt calculation
Definition at line 1026 of file measures3d.c.
1036 r = ((p->x - A->x) * (B->x - A->x) + (p->y - A->y) * (B->y - A->y) + (p->z - A->z) * (B->z - A->z)) /
1037 ((B->x - A->x) * (B->x - A->x) + (B->y - A->y) * (B->y - A->y) + (B->z - A->z) * (B->z - A->z));
int lw_dist3d_pt_pt(const POINT3DZ *thep1, const POINT3DZ *thep2, DISTPTS3D *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition: measures3d.c:1082
Definition: liblwgeom.h:395
References DIST_MAX, lw_dist3d_pt_pt(), DISTPTS3D::mode, r, POINT3DZ::x, POINT3DZ::y, and POINT3DZ::z.
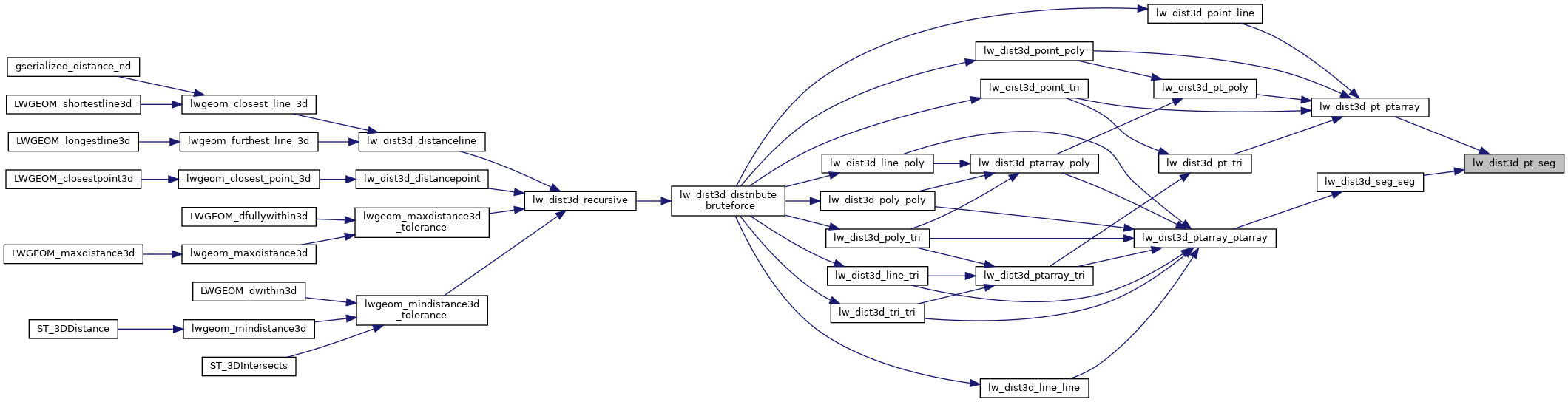
Referenced by lw_dist3d_pt_ptarray(), and lw_dist3d_seg_seg().
Here is the call graph for this function:

Here is the caller graph for this function: