◆ lw_arc_calculate_gbox_cartesian_2d()
| int lw_arc_calculate_gbox_cartesian_2d | ( | const POINT2D * | A1, |
| const POINT2D * | A2, | ||
| const POINT2D * | A3, | ||
| GBOX * | gbox | ||
| ) |
Definition at line 465 of file gbox.c.
double lw_arc_center(const POINT2D *p1, const POINT2D *p2, const POINT2D *p3, POINT2D *result)
Determines the center of the circle defined by the three given points.
Definition: lwalgorithm.c:234
int lw_segment_side(const POINT2D *p1, const POINT2D *p2, const POINT2D *q)
lw_segment_side()
Definition: lwalgorithm.c:70
Definition: liblwgeom.h:389
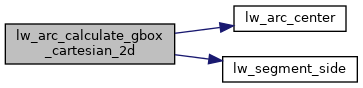
References FP_MAX, FP_MIN, lw_arc_center(), lw_segment_side(), LW_SUCCESS, LWDEBUG, POINT2D::x, GBOX::xmax, GBOX::xmin, POINT2D::y, GBOX::ymax, and GBOX::ymin.
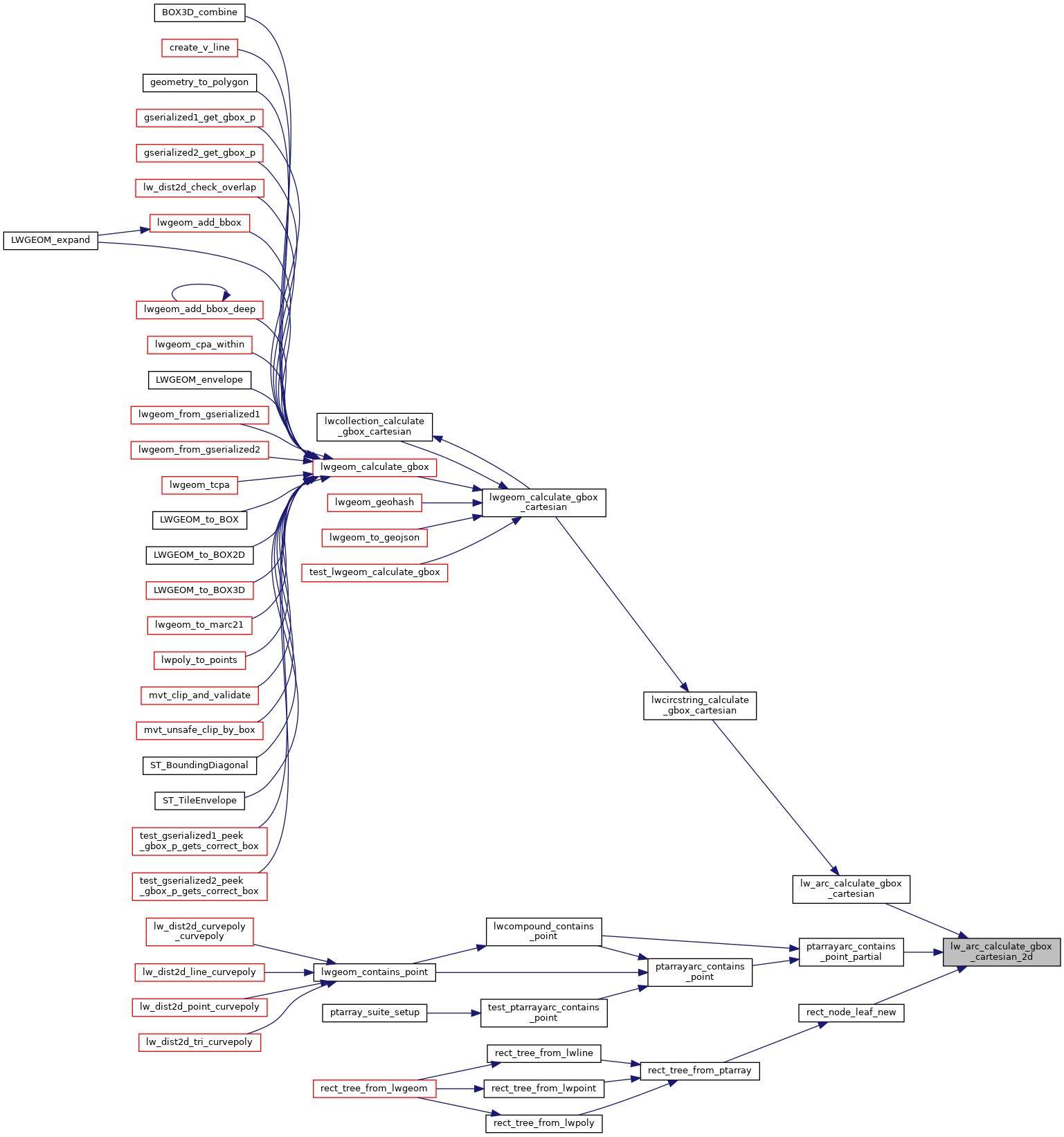
Referenced by lw_arc_calculate_gbox_cartesian(), ptarrayarc_contains_point_partial(), and rect_node_leaf_new().
Here is the call graph for this function:
Here is the caller graph for this function: