◆ lw_dist3d_seg_seg()
| int lw_dist3d_seg_seg | ( | const POINT3DZ * | s1p1, |
| const POINT3DZ * | s1p2, | ||
| const POINT3DZ * | s2p1, | ||
| const POINT3DZ * | s2p2, | ||
| DISTPTS3D * | dl | ||
| ) |
Finds the two closest points on two linesegments.
Definition at line 1173 of file measures3d.c.
1176 double s1k, s2k; /*two variables representing where on Line 1 (s1k) and where on Line 2 (s2k) a connecting line
1224 0.0; /*If the lines are parallel we try by using the startpoint of first segment. If that gives a
1237 /* Now we check if the projected closest point on the infinite lines is outside our segments. If so the
int lw_dist3d_pt_pt(const POINT3DZ *thep1, const POINT3DZ *thep2, DISTPTS3D *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition: measures3d.c:1082
static int get_3dvector_from_points(const POINT3DZ *p1, const POINT3DZ *p2, VECTOR3D *v)
Definition: measures3d.c:34
int lw_dist3d_pt_seg(const POINT3DZ *p, const POINT3DZ *A, const POINT3DZ *B, DISTPTS3D *dl)
If searching for min distance, this one finds the closest point on segment A-B from p.
Definition: measures3d.c:1026
Definition: liblwgeom.h:395
Definition: measures3d.h:51
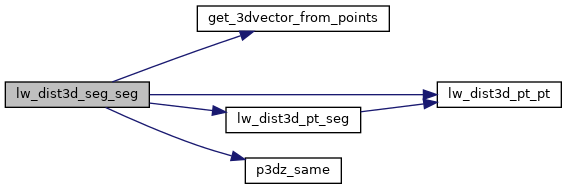
References DISTPTS3D::distance, DOT, get_3dvector_from_points(), lw_dist3d_pt_pt(), lw_dist3d_pt_seg(), LW_FALSE, LW_TRUE, DISTPTS3D::p1, DISTPTS3D::p2, p3dz_same(), DISTPTS3D::twisted, POINT3DZ::x, POINT3DZ::y, and POINT3DZ::z.
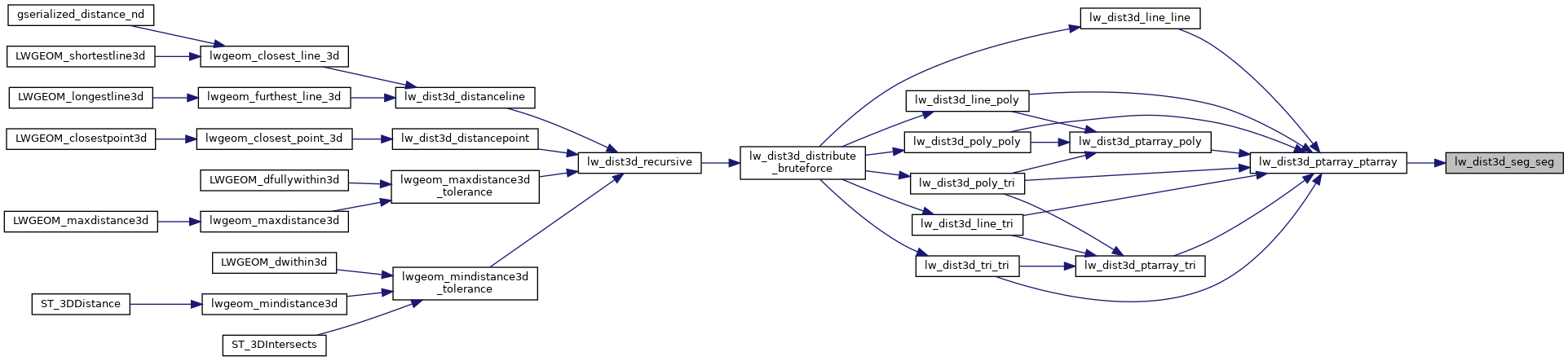
Referenced by lw_dist3d_ptarray_ptarray().
Here is the call graph for this function:
Here is the caller graph for this function: