◆ point_in_cone()
Utility function for checking if P is within the cone defined by A1/A2.
Definition at line 3307 of file lwgeodetic.c.
static void vector_difference(const POINT3D *a, const POINT3D *b, POINT3D *n)
Calculate the difference of two vectors.
Definition: lwgeodetic.c:476
static double dot_product(const POINT3D *p1, const POINT3D *p2)
Convert cartesian coordinates on unit sphere to lon/lat coordinates static void cart2ll(const POINT3D...
Definition: lwgeodetic.c:446
void vector_sum(const POINT3D *a, const POINT3D *b, POINT3D *n)
Calculate the sum of two vectors.
Definition: lwgeodetic.c:465
static int point3d_equals(const POINT3D *p1, const POINT3D *p2)
Utility function for ptarray_contains_point_sphere()
Definition: lwgeodetic.c:42
Definition: liblwgeom.h:401
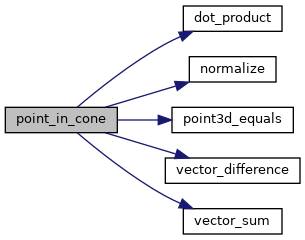
References dot_product(), LW_FALSE, LW_TRUE, normalize(), point3d_equals(), vector_difference(), and vector_sum().
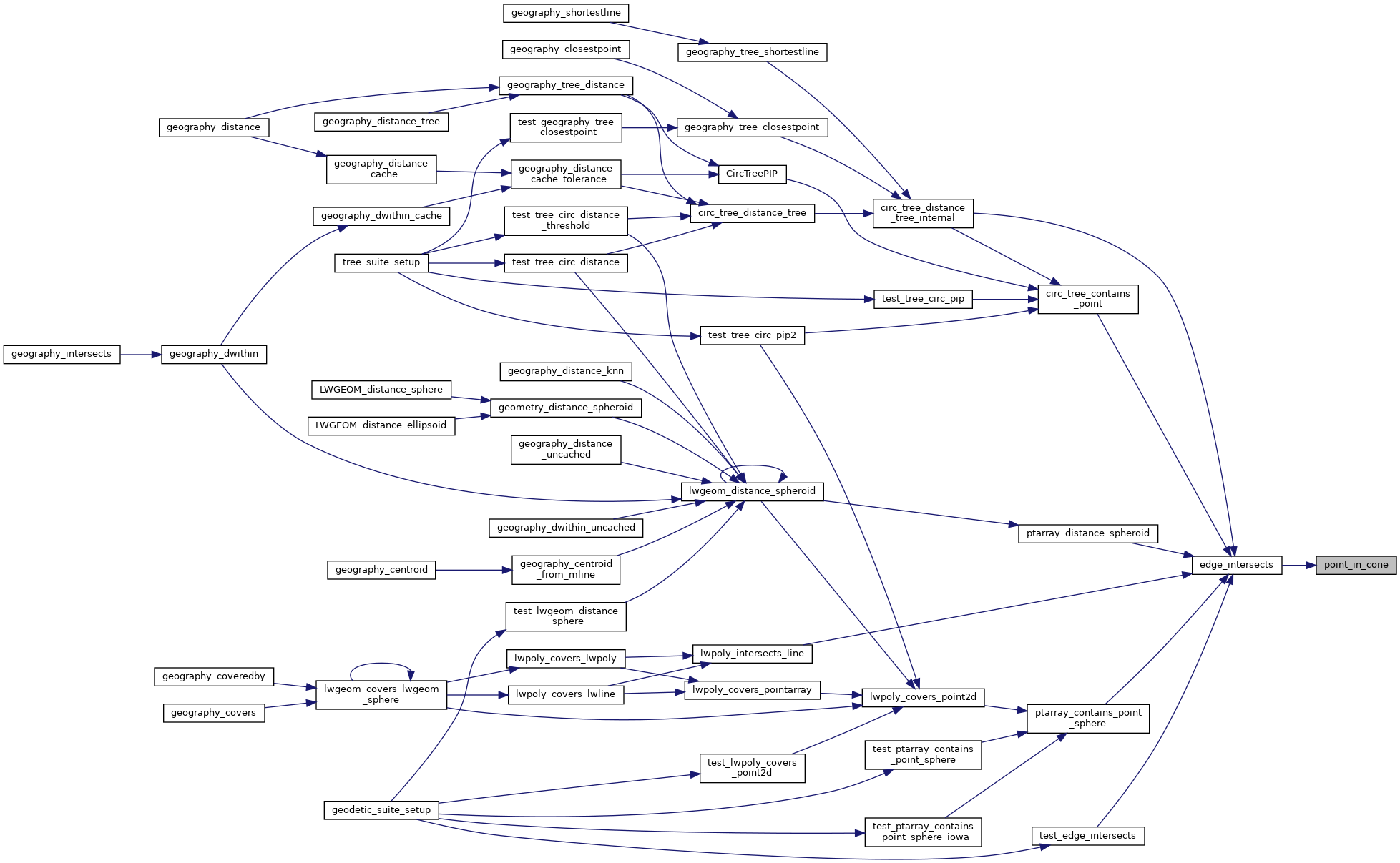
Referenced by edge_intersects().
Here is the call graph for this function:
Here is the caller graph for this function: