◆ segments_tcpa()
|
static |
Definition at line 987 of file lwlinearreferencing.c.
Definition: liblwgeom.h:395
References DOT, POINT3DZ::x, POINT4D::x, POINT3DZ::y, POINT4D::y, POINT3DZ::z, and POINT4D::z.
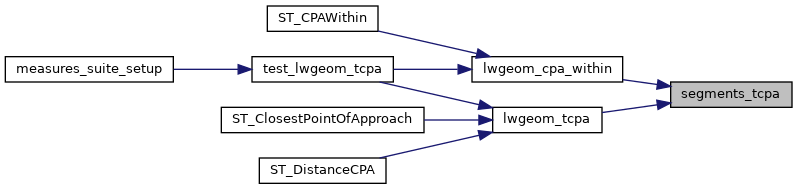
Referenced by lwgeom_cpa_within(), and lwgeom_tcpa().
Here is the caller graph for this function: