◆ kmeans()
|
static |
Definition at line 276 of file lwkmeans.c.
static void kmeans_init(POINT4D *objs, uint32_t n, POINT4D *centers, uint32_t k)
Definition: lwkmeans.c:175
static uint8_t update_r(POINT4D *objs, uint32_t *clusters, uint32_t n, POINT4D *centers, double *radii, uint32_t k)
Definition: lwkmeans.c:109
static void update_means(POINT4D *objs, uint32_t *clusters, uint32_t n, POINT4D *centers, uint32_t k)
Definition: lwkmeans.c:149
static uint32_t improve_structure(POINT4D *objs, uint32_t *clusters, uint32_t n, POINT4D *centers, double *radii, uint32_t k, double max_radius)
Definition: lwkmeans.c:42
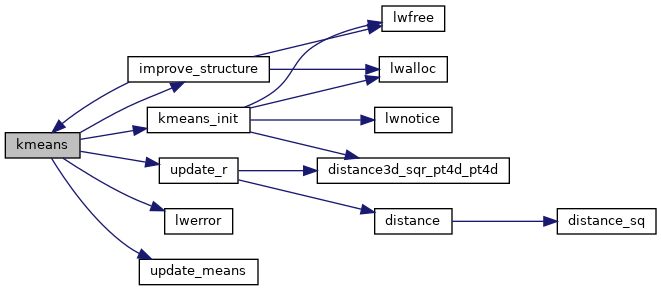
References improve_structure(), kmeans_init(), KMEANS_MAX_ITERATIONS, LW_FALSE, LW_ON_INTERRUPT, lwerror(), update_means(), and update_r().
Referenced by improve_structure(), and lwgeom_cluster_kmeans().
Here is the call graph for this function:
Here is the caller graph for this function:
