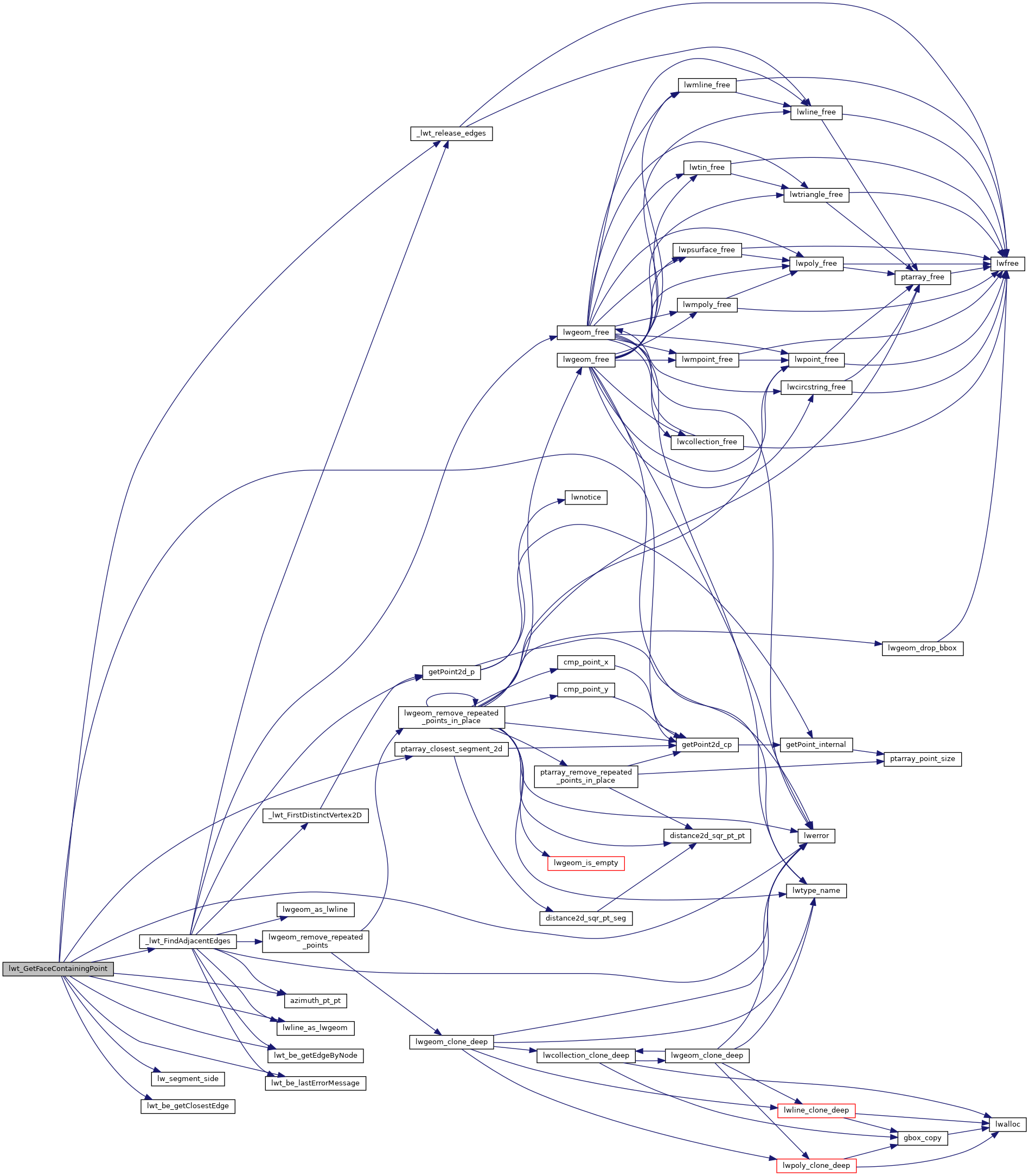
Find the face-id of the face properly containing a given point.
7038 uint64_t numedges, i;
7040 const POINT2D *closestPointOnEdge = NULL;
7041 uint32_t closestSegmentIndex;
7042 int closestSegmentSide;
7043 uint32_t closestPointVertex;
7044 const POINT2D *closestSegmentP0, *closestSegmentP1;
7047 int containingFace = -1;
7057 if (numedges == UINT64_MAX)
7079 closestSegmentP0->
x,
7080 closestSegmentP0->
y,
7081 closestSegmentP1->
x,
7099 const POINT2D *p = queryPoint;
7100 const POINT2D *A = closestSegmentP0;
7101 const POINT2D *B = closestSegmentP1;
7102 double r = ( (p->
x-A->
x) * (B->
x-A->
x) + (p->
y-A->
y) * (B->
y-A->
y) )/( (B->
x-A->
x)*(B->
x-A->
x) +(B->
y-A->
y)*(B->
y-A->
y) );
7105 closestPointOnEdge = A;
7106 closestPointVertex = closestSegmentIndex;
7107 if ( closestSegmentIndex == 0 )
7114 closestPointOnEdge = B;
7115 closestPointVertex = closestSegmentIndex + 1;
7118 closestNode = closestEdge->
end_node;
7126 if ( closestNode != 0 )
7128 LWDEBUGF(1,
"Closest point is node %d", closestNode);
7131 LWDEBUGF(1,
"Query point is node %d", closestNode);
7142 lwerror(
"Two or more faces found");
7145 containingFace = closestEdge->
face_left;
7150 if (numedges == UINT64_MAX)
7157 for (i=0; i<numedges; ++i)
7159 if ( edges[i].face_left != containingFace ||
7160 edges[i].face_right != containingFace )
7164 lwerror(
"Two or more faces found");
7170 lwerror(
"Unexpected backend return: getEdgeByNode(%d) returns no edges when we previously found edge %d ending on that node",
7171 closestNode, closestEdge->
edge_id);
7176 LWDEBUGF(1,
"lwt_be_getEdgeByNode returned %d edges", numedges);
7179 return containingFace;
7187 lwerror(
"error computing azimuth of query point [%.15g %.15g,%.15g %.15g]",
7188 closestPointOnEdge->
x, closestPointOnEdge->
y,
7189 queryPoint->
x, queryPoint->
y);
7198 lwerror(
"Unexpected backend return: _lwt_FindAdjacentEdges(%d) found no edges when we previously found edge %d ending on that node",
7199 closestNode, closestEdge->
edge_id);
7209 LWDEBUG(1,
"Closest point is NOT a node");
7215 containingFace = closestEdge->
face_left;
7217 return containingFace;
7224 lwerror(
"Two or more faces found");
7232 LWDEBUGF(1,
"Closest point is vertex %d of closest segment", closestPointVertex);
7243 uint32_t prevVertexIndex = closestPointVertex > 0 ?
7244 closestPointVertex - 1u :
7252 LWDEBUGF(1,
"Previous vertex %u is POINT(%.15g %.15g)",
7258 uint32_t nextVertexIndex = closestPointVertex == closestEdge->
geom->
points->
npoints - 1u ?
7260 closestPointVertex + 1u;
7267 LWDEBUGF(1,
"Next vertex %u is POINT(%.15g %.15g)",
7278 if ( !
azimuth_pt_pt(closestPointOnEdge, prevVertex, &azS0)) {
7279 lwerror(
"error computing azimuth of segment to closest point [%.15g %.15g,%.15g %.15g]",
7280 closestPointOnEdge->
x, closestPointOnEdge->
y,
7281 prevVertex->
x, prevVertex->
y);
7285 if ( !
azimuth_pt_pt(closestPointOnEdge, nextVertex, &azS1)) {
7286 lwerror(
"error computing azimuth of segment from closest point [%.15g %.15g,%.15g %.15g]",
7287 closestPointOnEdge->
x, closestPointOnEdge->
y,
7288 nextVertex->
x, nextVertex->
y);
7292 if ( !
azimuth_pt_pt(closestPointOnEdge, queryPoint, &azSL) ) {
7293 lwerror(
"error computing azimuth of queryPoint [%.15g %.15g,%.15g %.15g]",
7294 closestPointOnEdge->
x, closestPointOnEdge->
y,
7295 queryPoint->
x, queryPoint->
y);
7300 double angle_S0_S1 = azS1 - azS0;
7301 if ( angle_S0_S1 < 0 ) angle_S0_S1 += 2 * M_PI;
7303 double angle_S0_SL = azSL - azS0;
7304 if ( angle_S0_SL < 0 ) angle_S0_SL += 2 * M_PI;
7306 LWDEBUGF(1,
"Azimuths from closest (vertex) point: P:%g, N:%g (+%g), Q:%g (+%g)",
7311 if ( angle_S0_SL < angle_S0_S1 )
7314 containingFace = closestEdge->
face_left;
7327 LWDEBUGF(1,
"Closest point is internal to closest segment, calling lw_segment_side((%g,%g),(%g,%g),(%g,%g)",
7328 closestSegmentP0->
x,
7329 closestSegmentP0->
y,
7330 closestSegmentP1->
x,
7331 closestSegmentP1->
y,
7336 closestSegmentSide =
lw_segment_side(closestSegmentP0, closestSegmentP1, queryPoint);
7337 LWDEBUGF(1,
"Side of closest segment query point falls on: %d", closestSegmentSide);
7339 if ( closestSegmentSide == -1 )
7341 containingFace = closestEdge->
face_left;
7343 else if ( closestSegmentSide == 1 )
7349 lwerror(
"Unexpected collinearity reported from lw_segment_side");
7357 return containingFace;
LWGEOM * lwline_as_lwgeom(const LWLINE *obj)
int ptarray_closest_segment_2d(const POINTARRAY *pa, const POINT2D *qp, double *dist)
int azimuth_pt_pt(const POINT2D *p1, const POINT2D *p2, double *ret)
Compute the azimuth of segment AB in radians.
int lw_segment_side(const POINT2D *p1, const POINT2D *p2, const POINT2D *q)
lw_segment_side()
#define LWT_COL_EDGE_FACE_RIGHT
LWT_INT64 LWT_ELEMID
Identifier of topology element.
#define LWT_COL_EDGE_START_NODE
#define LWT_COL_EDGE_FACE_LEFT
#define LWT_COL_EDGE_EDGE_ID
Edge fields.
#define LWT_COL_EDGE_END_NODE
#define LWT_COL_EDGE_GEOM
#define LWDEBUG(level, msg)
#define LWDEBUGF(level, msg,...)
void lwerror(const char *fmt,...)
Write a notice out to the error handler.
#define LWDEBUGGF(level, geom, fmt,...)
const char * lwt_be_lastErrorMessage(const LWT_BE_IFACE *be)
static LWT_ISO_EDGE * lwt_be_getEdgeByNode(LWT_TOPOLOGY *topo, const LWT_ELEMID *ids, uint64_t *numelems, int fields)
static LWT_ISO_EDGE * lwt_be_getClosestEdge(const LWT_TOPOLOGY *topo, const LWPOINT *pt, uint64_t *numelems, int fields)
static int _lwt_FindAdjacentEdges(LWT_TOPOLOGY *topo, LWT_ELEMID node, edgeend *data, edgeend *other, int myedge_id)
static void _lwt_release_edges(LWT_ISO_EDGE *edges, int num_edges)
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
const LWT_BE_IFACE * be_iface