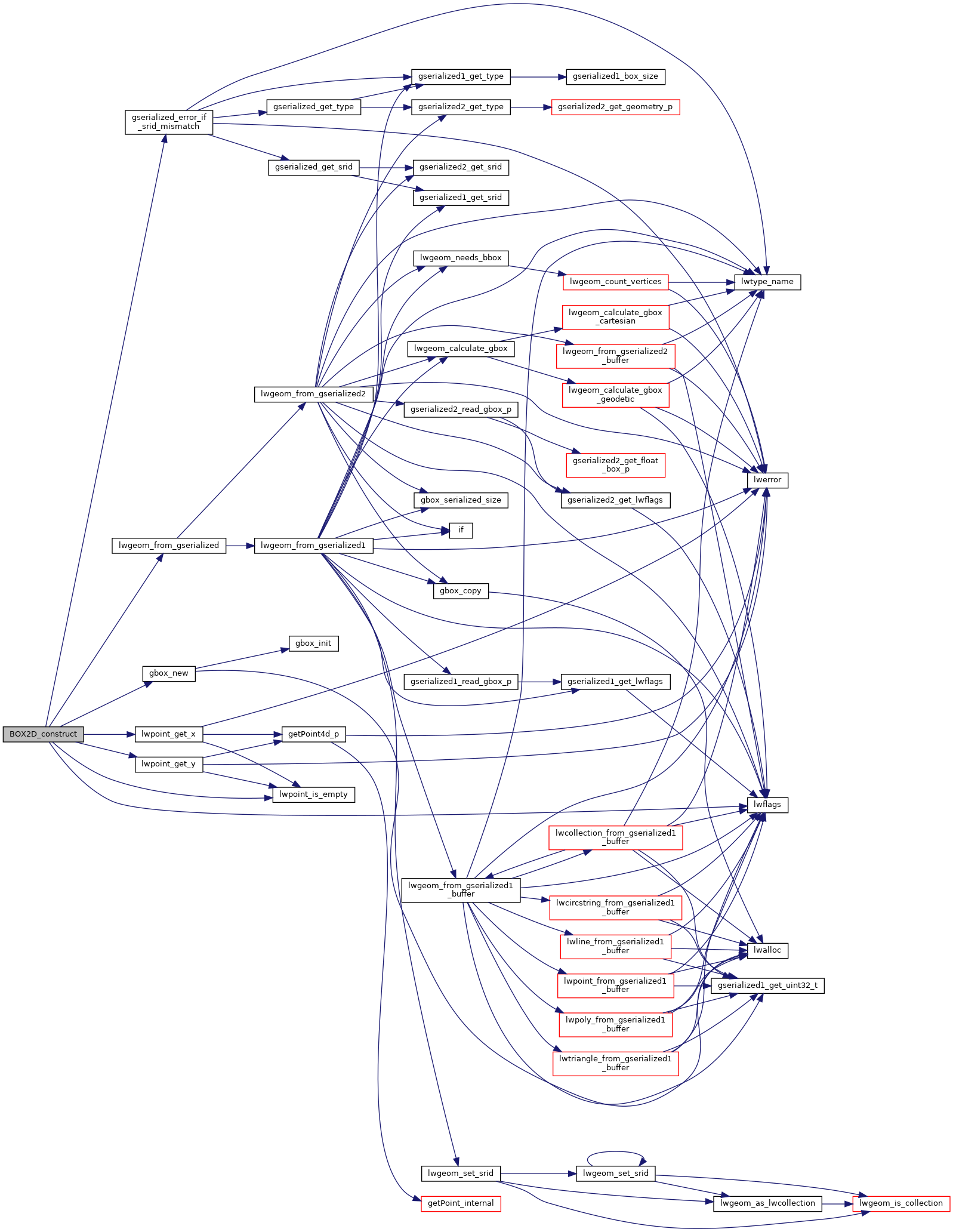
◆ BOX2D_construct()
| Datum BOX2D_construct | ( | PG_FUNCTION_ARGS | ) |
Definition at line 534 of file lwgeom_box.c.
GBOX * gbox_new(lwflags_t flags)
Create a new gbox with the dimensionality indicated by the flags.
Definition: gbox.c:32
void gserialized_error_if_srid_mismatch(const GSERIALIZED *g1, const GSERIALIZED *g2, const char *funcname)
Definition: gserialized.c:403
LWGEOM * lwgeom_from_gserialized(const GSERIALIZED *g)
Allocate a new LWGEOM from a GSERIALIZED.
Definition: gserialized.c:239
lwflags_t lwflags(int hasz, int hasm, int geodetic)
Construct a new flags bitmask.
Definition: lwutil.c:471
int lwpoint_is_empty(const LWPOINT *point)
Definition: liblwgeom.h:352
Definition: liblwgeom.h:443
Definition: liblwgeom.h:469
References gbox_new(), gserialized_error_if_srid_mismatch(), lwflags(), lwgeom_from_gserialized(), lwpoint_get_x(), lwpoint_get_y(), lwpoint_is_empty(), POINTTYPE, result, and LWPOINT::type.
Here is the call graph for this function: