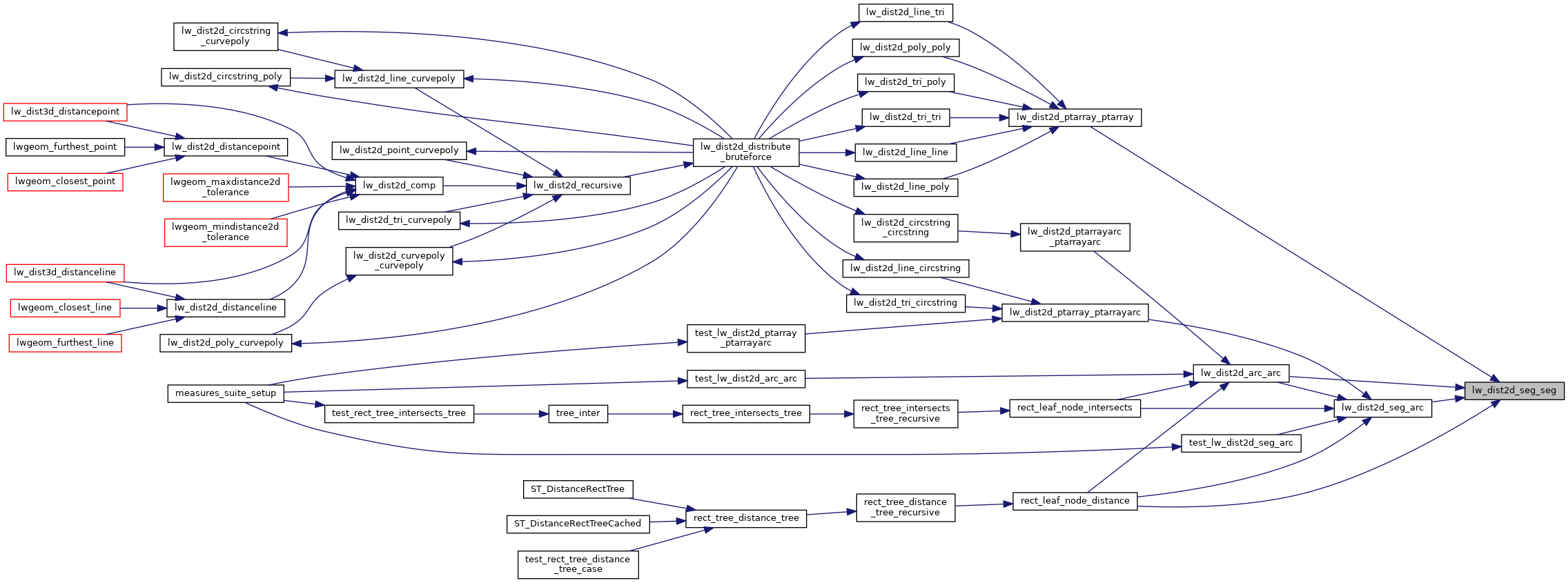
◆ lw_dist2d_seg_seg()
| int lw_dist2d_seg_seg | ( | const POINT2D * | A, |
| const POINT2D * | B, | ||
| const POINT2D * | C, | ||
| const POINT2D * | D, | ||
| DISTPTS * | dl | ||
| ) |
Finds the shortest distance between two segments.
This function is changed so it is not doing any comparison of distance but just sending every possible combination further to lw_dist2d_pt_seg
Definition at line 1840 of file measures.c.
1890 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1905 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1914 /* If there is intersection we identify the intersection point and return it but only if we are looking
static void lw_dist2d_distpts_set(DISTPTS *dl, double distance, const POINT2D *p1, const POINT2D *p2)
Definition: measures.c:81
int lw_dist2d_pt_seg(const POINT2D *p, const POINT2D *A, const POINT2D *B, DISTPTS *dl)
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before i...
Definition: measures.c:2227
Definition: liblwgeom.h:404
References DIST_MAX, DIST_MIN, lw_dist2d_distpts_set(), lw_dist2d_pt_seg(), LW_FALSE, LW_TRUE, DISTPTS::mode, r, s, DISTPTS::twisted, POINT2D::x, and POINT2D::y.
Referenced by lw_dist2d_arc_arc(), lw_dist2d_ptarray_ptarray(), lw_dist2d_seg_arc(), and rect_leaf_node_distance().
Here is the call graph for this function:

Here is the caller graph for this function: