◆ lw_dist2d_pre_seg_seg()
| int lw_dist2d_pre_seg_seg | ( | POINTARRAY * | l1, |
| POINTARRAY * | l2, | ||
| LISTSTRUCT * | list1, | ||
| LISTSTRUCT * | list2, | ||
| double | k, | ||
| DISTPTS * | dl | ||
| ) |
preparation before lw_dist2d_seg_seg.
Definition at line 2081 of file measures.c.
2098 /*we break this iteration when we have checked every point closer to our perpendicular "checkline" than
2102 /*because we are not iterating in the original point order we have to check the segment before and after
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
Definition: lwinline.h:101
int lw_dist2d_selected_seg_seg(const POINT2D *A, const POINT2D *B, const POINT2D *C, const POINT2D *D, DISTPTS *dl)
This is the same function as lw_dist2d_seg_seg but without any calculations to determine intersection...
Definition: measures.c:2186
int lw_dist2d_pt_pt(const POINT2D *thep1, const POINT2D *thep2, DISTPTS *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition: measures.c:2322
Definition: liblwgeom.h:404
References DISTPTS::distance, getPoint2d_cp(), lw_dist2d_pt_pt(), lw_dist2d_selected_seg_seg(), LW_FALSE, LW_TRUE, LWDEBUG, POINTARRAY::npoints, LISTSTRUCT::pnr, r, DISTPTS::twisted, POINT2D::x, and POINT2D::y.
Referenced by lw_dist2d_fast_ptarray_ptarray().
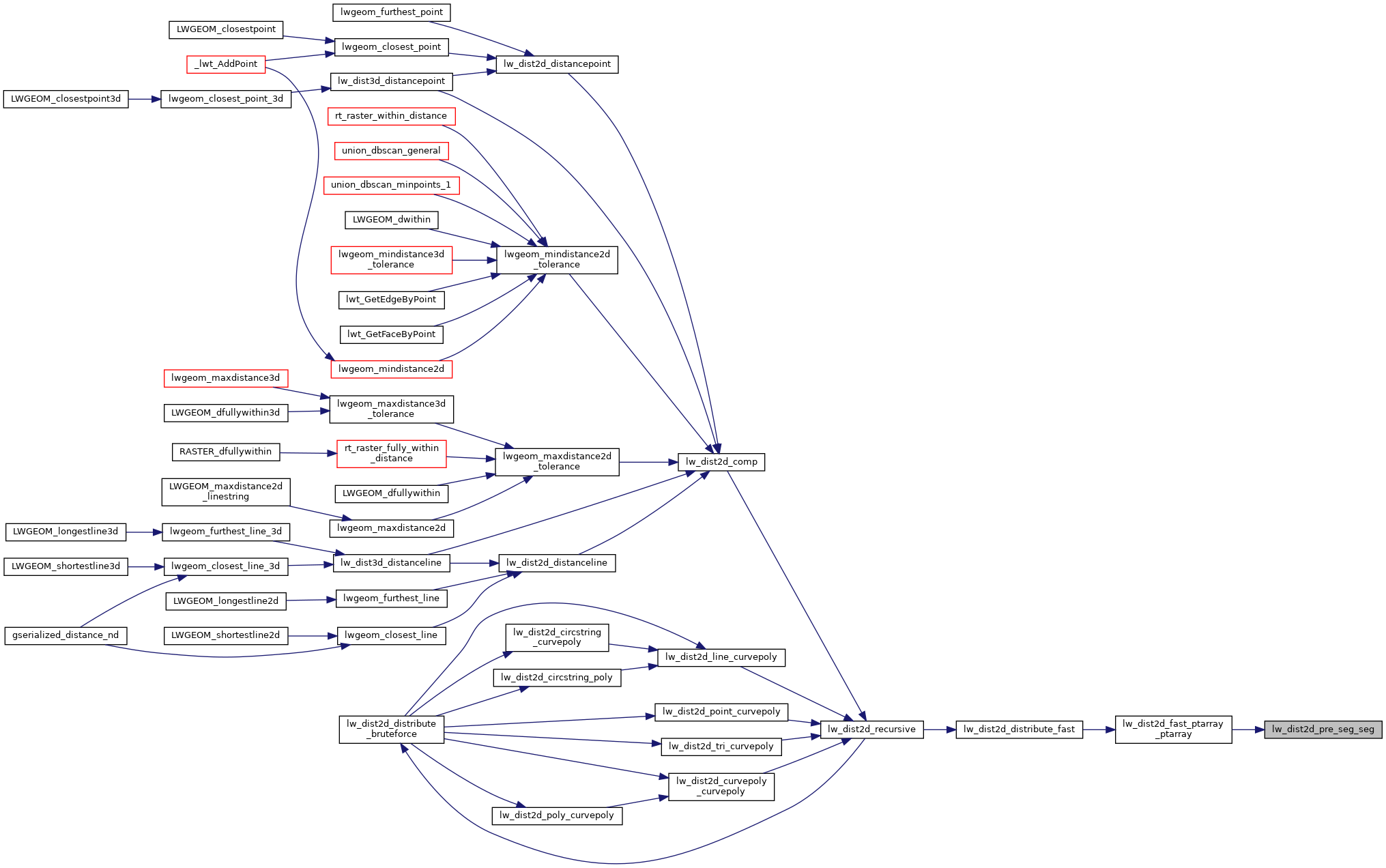
Here is the call graph for this function:

Here is the caller graph for this function: