Loading...
Searching...
No Matches
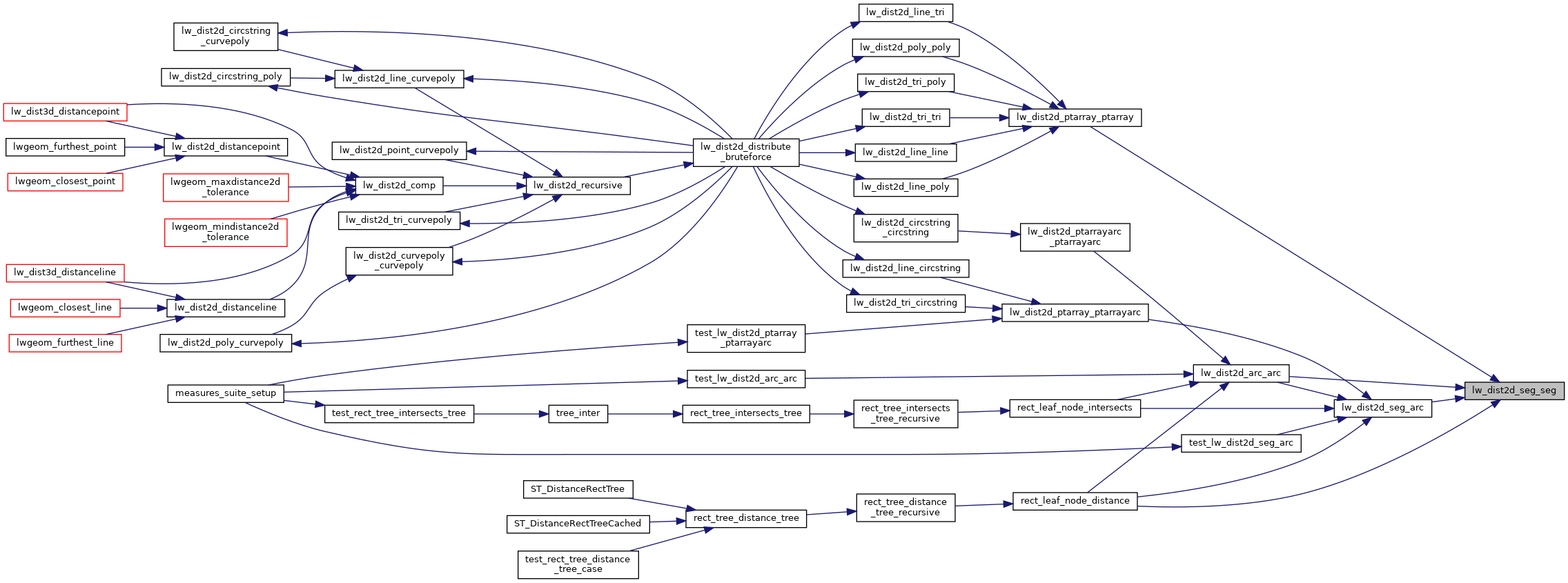
◆ lw_dist2d_seg_seg()
| int lw_dist2d_seg_seg | ( | const POINT2D * | A, |
| const POINT2D * | B, | ||
| const POINT2D * | C, | ||
| const POINT2D * | D, | ||
| DISTPTS * | dl | ||
| ) |
Finds the shortest distance between two segments.
This function is changed so it is not doing any comparison of distance but just sending every possible combination further to lw_dist2d_pt_seg
Definition at line 1916 of file measures.c.
1917{
1920
1921 /*A and B are the same point */
1923 {
1925 }
1926
1927 /*U and V are the same point */
1929 {
1932 }
1933
1934 /* AB and CD are line segments */
1935 /* from comp.graphics.algo
1936
1937 Solving the above for r and s yields
1938 (Ay-Cy)(Dx-Cx)-(Ax-Cx)(Dy-Cy)
1939 r = ----------------------------- (eqn 1)
1940 (Bx-Ax)(Dy-Cy)-(By-Ay)(Dx-Cx)
1941
1942 (Ay-Cy)(Bx-Ax)-(Ax-Cx)(By-Ay)
1943 s = ----------------------------- (eqn 2)
1944 (Bx-Ax)(Dy-Cy)-(By-Ay)(Dx-Cx)
1945 Let P be the position vector of the intersection point, then
1946 P=A+r(B-A) or
1947 Px=Ax+r(Bx-Ax)
1948 Py=Ay+r(By-Ay)
1949 By examining the values of r & s, you can also determine some other limiting conditions:
1950 If 0<=r<=1 & 0<=s<=1, intersection exists
1951 r<0 or r>1 or s<0 or s>1 line segments do not intersect
1952 If the denominator in eqn 1 is zero, AB & CD are parallel
1953 If the numerator in eqn 1 is also zero, AB & CD are collinear.
1954
1955 */
1958
1961
1962 if ((r_bot == 0) || (s_bot == 0))
1963 {
1965 {
1966 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1967 dl->twisted *= -1;
1969 }
1970 else
1972 }
1973
1974 s = s_top / s_bot;
1975 r = r_top / r_bot;
1976
1978 {
1980 {
1981 /* change the order of inputted geometries and that we notice by changing sign on dl->twisted*/
1982 dl->twisted *= -1;
1984 }
1985 else
1987 }
1988 else
1989 {
1990 /* If there is intersection we identify the intersection point and return it but only if we are looking
1991 * for mindistance */
1993 {
1994 POINT2D theP;
1995
1997 {
2000 }
2002 {
2005 }
2006 else
2007 {
2010 }
2011 dl->distance = 0.0;
2012 dl->p1 = theP;
2013 dl->p2 = theP;
2014 }
2016 }
2017}
int lw_dist2d_pt_seg(const POINT2D *p, const POINT2D *A, const POINT2D *B, DISTPTS *dl)
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before i...
Definition measures.c:2305
Definition liblwgeom.h:375
References DIST_MAX, DIST_MIN, DISTPTS::distance, lw_dist2d_pt_seg(), LW_FALSE, LW_TRUE, DISTPTS::mode, DISTPTS::p1, DISTPTS::p2, r, s, DISTPTS::twisted, POINT2D::x, and POINT2D::y.
Referenced by lw_dist2d_arc_arc(), lw_dist2d_ptarray_ptarray(), lw_dist2d_seg_arc(), and rect_leaf_node_distance().
Here is the call graph for this function:

Here is the caller graph for this function: